Princíp činnosti a zariadenie elektromotora
Akýkoľvek elektromotor je navrhnutý tak, aby vykonával mechanickú prácu v dôsledku spotreby elektrickej energie, ktorá sa naň aplikuje, ktorá sa zvyčajne mení na rotačný pohyb. Hoci v technológii existujú modely, ktoré okamžite vytvárajú translačný pohyb pracovného tela. Tieto sa nazývajú lineárne motory.
V priemyselných zariadeniach elektromotory poháňajú rôzne stroje na rezanie kovov a mechanické zariadenia zapojené do technologického výrobného procesu.
V domácich spotrebičoch poháňajú elektromotory práčky, vysávače, počítače, sušiče vlasov, detské hračky, hodiny a mnoho ďalších zariadení.

Základné fyzikálne procesy a princíp pôsobenia
Pri pohybe vo vnútri magnetické pole elektrické náboje, ktoré sa nazývajú elektrické prúdy, majú vždy mechanickú silu, ktorá má tendenciu vychyľovať ich smer v rovine kolmej na orientáciu siločiar magnetického poľa.Keď elektrický prúd prechádza kovovým drôtom alebo cievkou z neho vyrobenou, táto sila má tendenciu pohybovať/otáčať každým drôtom nesúcim prúd a celou cievkou ako celkom.
Na fotografii nižšie je znázornený kovový rám, cez ktorý preteká prúd. Magnetické pole aplikované na ňu vytvára silu F pre každú vetvu rámu, ktorá vytvára rotačný pohyb.

Táto vlastnosť interakcie elektrickej a magnetickej energie, založená na vytváraní elektromotorickej sily v uzavretej vodivej slučke, je uvedená do prevádzky na každom elektromotore. Jeho dizajn zahŕňa:
-
cievka, ktorou preteká elektrický prúd. Je uložený na špeciálnom kotevnom jadre a upevnený v rotačných ložiskách na zníženie odolnosti voči trecím silám. Táto konštrukcia sa nazýva rotor;
-
stator, ktorý vytvára magnetické pole, ktoré svojimi siločiarami preniká elektrickými nábojmi prechádzajúcimi pozdĺž závitov vinutia rotora;
-
puzdro na umiestnenie statora. Vo vnútri tela sú vyrobené špeciálne sedadlá, vo vnútri ktorých sú namontované vonkajšie klietky ložísk rotora.
Zjednodušený dizajn najjednoduchšieho elektromotora môže byť znázornený obrázkom nasledujúcej formy.

Pri otáčaní rotora vzniká krútiaci moment, ktorého výkon závisí od celkovej konštrukcie zariadenia, množstva aplikovanej elektrickej energie a jej strát pri premenách.
Veľkosť maximálneho možného krútiaceho momentu motora je vždy menšia ako elektrická energia, ktorá sa naň privádza. Vyznačuje sa hodnotou účinnosti.
Typy elektromotorov
Podľa typu prúdu pretekajúceho cievkami sa delia na jednosmerné alebo striedavé motory.Každá z týchto dvoch skupín má veľké množstvo úprav s použitím rôznych technologických postupov.
DC motory
Majú statorové magnetické pole vytvorené stacionárnym pevným permanentné magnety alebo špeciálne elektromagnety s budiacimi cievkami. Cievka kotvy je pevne uložená v hriadeli, ktorý je upevnený v ložiskách a môže sa voľne otáčať okolo vlastnej osi.
Základná štruktúra takéhoto motora je znázornená na obrázku.

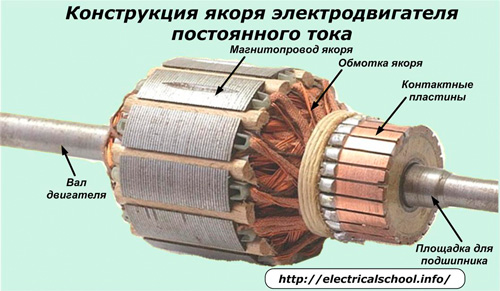
Na jadre kotvy z feromagnetických materiálov je cievka pozostávajúca z dvoch sériovo zapojených častí, ktoré sú na jednom konci spojené s vodivými kolektorovými platňami a na druhom sú navzájom spojené. Dve grafitové kefy sú umiestnené na diametrálne opačných koncoch kotvy a sú pritlačené na kontaktné podložky kolektorových dosiek.
Pozitívny potenciál zdroja jednosmerného prúdu sa aplikuje na spodnú kefu so vzorom a záporný potenciál na hornú kefu. Smer prúdu pretekajúceho cievkou je znázornený prerušovanou červenou šípkou.
Prúd spôsobuje, že magnetické pole má severný pól v ľavej dolnej časti kotvy a južný pól v pravej hornej časti kotvy (pravidlo kardanu). To má za následok odpudzovanie pólov rotora od rovnomenných stacionárnych a príťažlivosť k opačným pólom statora. V dôsledku aplikovanej sily dochádza k rotačnému pohybu, ktorého smer je označený hnedou šípkou.
Pri ďalšom otáčaní kotvy zotrvačnosťou sa póly prenesú na ďalšie kolektorové dosky. Smer prúdu v nich je obrátený. Rotor sa ďalej otáča.
Jednoduchá konštrukcia takéhoto kolektorového zariadenia vedie k veľkým stratám elektrickej energie.Takéto motory fungujú v zariadeniach jednoduchého dizajnu alebo v hračkách pre deti.
Jednosmerné elektromotory zapojené do výrobného procesu majú zložitejšiu konštrukciu:
-
cievka nie je rozdelená na dve, ale na niekoľko častí;
-
každá časť cievky je namontovaná na svojom vlastnom póle;
-
kolektorové zariadenie je vyrobené s určitým počtom kontaktných plôšok podľa počtu vinutí.
Výsledkom je hladké spojenie každého pólu cez jeho kontaktné dosky s kefami a zdrojom prúdu a sú znížené energetické straty.
Zariadenie takejto kotvy je znázornené na fotografii.
V jednosmerných motoroch je možné obrátiť smer otáčania rotora. K tomu stačí zmeniť pohyb prúdu v cievke na opačný zmenou polarity pri zdroji.
AC motory
Od predchádzajúcich návrhov sa líšia tým, že elektrický prúd prúdiaci v ich cievke je opísaný o sínusový harmonický zákonperiodicky mení svoj smer (znamenie). Na ich napájanie sa napätie dodáva z generátorov so striedavými znakmi.
Stator takýchto motorov je vykonávaný magnetickým obvodom. Je vyrobený z feromagnetických dosiek s drážkami, v ktorých sú uložené závity cievky s konfiguráciou rámu (cievky).

Synchrónne elektromotory
Na fotografii nižšie je znázornený princíp činnosti jednofázového striedavého motora so synchrónnym otáčaním elektromagnetických polí rotora a statora.

V drážkach magnetického obvodu statora na diametrálne opačných koncoch sú umiestnené drôty vinutia, schematicky znázornené vo forme rámu, cez ktorý preteká striedavý prúd.
Uvažujme prípad časového okamihu zodpovedajúceho prechodu kladnej časti jej polvlny.
V ložiskových článkoch sa voľne otáča rotor so zabudovaným permanentným magnetom, v ktorom sú jasne definované severné «N ústie» a južné «S ústie» pólu. Keď cez vinutie statora preteká kladná polvlna prúdu, vytvára sa v ňom magnetické pole s pólmi «S st» a «N st».
Medzi magnetickými poľami rotora a statora vznikajú interakčné sily (pri odpudzovaní pólov a na rozdiel od priťahovania pólov), ktoré majú tendenciu otáčať kotvu motora z akejkoľvek polohy do extrému, keď sú opačné póly umiestnené čo najbližšie k sebe. ďalší.
Ak vezmeme do úvahy rovnaký prípad, ale v čase, keď cez drôt rámu prechádza opačný - záporná polvlna prúdu, potom dôjde k rotácii kotvy v opačnom smere.
Na zabezpečenie nepretržitého pohybu rotora v statore nie je vyrobený jeden rám vinutia, ale ich určitý počet, pretože každý z nich je napájaný samostatným zdrojom prúdu.
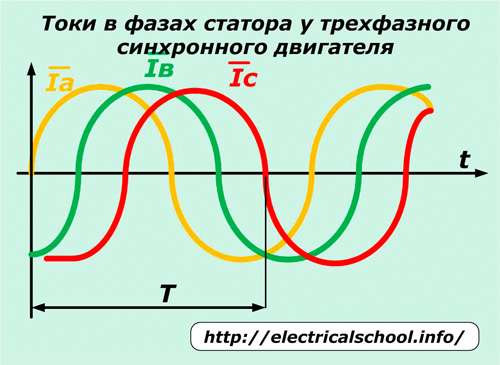
Princíp činnosti trojfázového striedavého motora so synchrónnym otáčaním, elektromagnetické polia rotora a statora sú znázornené na nasledujúcom obrázku.

V tomto dizajne sú tri cievky A, B a C namontované vo vnútri magnetického obvodu statora, navzájom posunuté o uhly 120 stupňov. Cievka A je označená žltou farbou, B je zelená a C je červená. Každá cievka je vyrobená s rovnakými rámami ako v predchádzajúcom prípade.
Na obrázku v každom prípade prúd preteká iba jednou cievkou v smere dopredu alebo dozadu, čo je označené znakmi «+» a «-«.
Pri prechode kladnej polvlny cez fázu A v doprednom smere zaujme os rotorového poľa horizontálnu polohu, pretože magnetické póly statora sú vytvorené v tejto rovine a priťahujú pohyblivú kotvu. Opačné póly rotora majú tendenciu sa približovať k pólom statora.
Keď kladná polovičná vlna prejde do fázy C, kotva sa otočí o 60 stupňov v smere hodinových ručičiek. Po privedení prúdu do fázy B dôjde k podobnej rotácii kotvy. Každý nasledujúci tok prúdu v ďalšej fáze nasledujúceho vinutia otočí rotor.
Ak sa na každé vinutie privedie trojfázové sieťové napätie posunuté o uhol 120 stupňov, tak v nich budú kolovať striedavé prúdy, ktoré roztáčajú kotvu a vytvárajú jej synchrónne otáčanie s priloženým elektromagnetickým poľom.
Rovnaká mechanická konštrukcia je úspešne použitá v trojfázovom krokovom motore... Len v každom vinutí ovládaním špeciálny ovládač (ovládač krokového motora) Konštantné impulzy sú aplikované a odstránené podľa algoritmu opísaného vyššie.
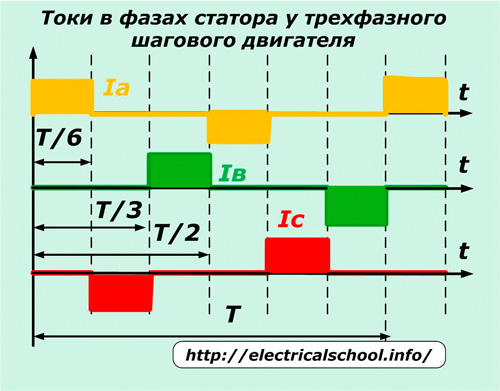
Ich spustenie spustí rotačný pohyb a ich ukončenie v určitom časovom bode poskytuje meranú rotáciu hriadeľa a zastavenie v naprogramovanom uhle na vykonanie určitých technologických operácií.
V oboch opísaných trojfázových systémoch je možné meniť smer otáčania kotvy. Aby ste to dosiahli, stačí zmeniť postupnosť fáz «A» — «B» — «C» na inú, napríklad «A» — «C» — «B».
Rýchlosť rotora je regulovaná dĺžkou periódy T. Jej zmenšenie vedie k zrýchleniu rotácie.Veľkosť amplitúdy prúdu vo fáze závisí od vnútorného odporu vinutia a hodnoty napätia, ktoré sa naň aplikuje. Určuje veľkosť krútiaceho momentu a výkon elektromotora.
Asynchrónne motory
Tieto konštrukcie motorov majú rovnaký magnetický obvod statora s vinutím ako v predtým diskutovaných jednofázových a trojfázových modeloch. Svoj názov dostali podľa asynchrónneho otáčania elektromagnetických polí kotvy a statora. To sa dosiahne zlepšením konfigurácie rotora.
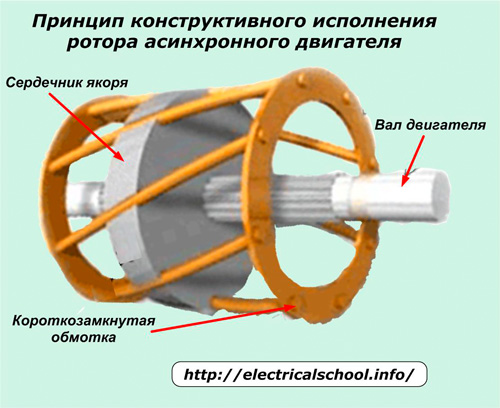
Jeho jadro je vyrobené z drážkovaných elektrooceľových plechov. Sú vybavené hliníkovými alebo medenými prúdovými vodičmi, ktoré sú na koncoch kotvy uzavreté vodivými krúžkami.
Pri privedení napätia na vinutia statora sa elektromotorickou silou indukuje elektrický prúd vo vinutí rotora a vzniká magnetické pole kotvy. Keď tieto elektromagnetické polia interagujú, hriadeľ motora sa začne otáčať.
Pri tejto konštrukcii je pohyb rotora možný až po výskyte rotujúceho elektromagnetického poľa v statore a pokračuje s ním v asynchrónnom režime prevádzky.
Asynchrónne motory majú jednoduchší dizajn.Preto sú lacnejšie a sú široko používané v priemyselných inštaláciách a domácich spotrebičoch.

Elektromotor ABB odolný proti výbuchu
Lineárne motory
Mnoho pracovných telies priemyselných mechanizmov vykonáva vratný alebo translačný pohyb v jednej rovine, čo je nevyhnutné pre prevádzku kovoobrábacích strojov, vozidiel, úderov kladivom pri jazde hromád ...
Presun takéhoto pracovného telesa pomocou prevodoviek, guľôčkových skrutiek, remeňových pohonov a podobných mechanických zariadení z rotačného elektromotora komplikuje konštrukciu. Moderným technickým riešením tohto problému je prevádzka lineárneho elektromotora.
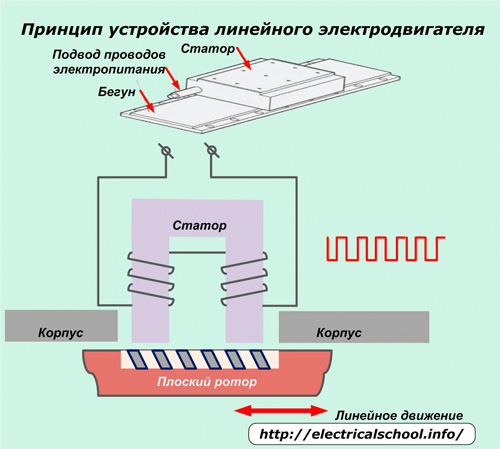
Jeho stator a rotor sú predĺžené vo forme pásikov, a nie navinuté do krúžkov, ako je to u rotačných elektromotorov.
Princíp činnosti spočíva v udelení vratného lineárneho pohybu obežnému rotoru v dôsledku prenosu elektromagnetickej energie zo stacionárneho statora s otvoreným magnetickým obvodom určitej dĺžky. Postupným zapínaním prúdu sa v ňom vytvára pracovné magnetické pole.
Pôsobí na vinutie kotvy s kolektorom. Sily vznikajúce v takomto motore pohybujú rotorom iba v lineárnom smere pozdĺž vodiacich prvkov.
Lineárne motory sú navrhnuté tak, aby fungovali buď na jednosmerný alebo striedavý prúd a môžu pracovať v synchrónnom alebo asynchrónnom režime.
Nevýhody lineárnych motorov sú:
-
zložitosť technológie;
-
vysoká cena;
-
nízka energetická účinnosť.