Spôsoby činnosti synchrónnych generátorov, prevádzkové charakteristiky generátorov
 Hlavné veličiny charakterizujúce synchrónny generátor sú: svorkové napätie U, nabíjanie I, zdanlivý výkon P (kVa), otáčky rotora za minútu n, účinník cos φ.
Hlavné veličiny charakterizujúce synchrónny generátor sú: svorkové napätie U, nabíjanie I, zdanlivý výkon P (kVa), otáčky rotora za minútu n, účinník cos φ.
Najdôležitejšie vlastnosti synchrónneho generátora sú nasledovné:
-
voľnobežná charakteristika,
-
vonkajšia charakteristika,
-
regulačná charakteristika.
Charakteristika synchrónneho generátora naprázdno
Elektromotorická sila generátora je úmerná veľkosti magnetického toku Ф vytvoreného budiacim prúdom iv a počtu otáčok rotora generátora za minútu:
E = cnF,
kde s — faktor proporcionality.
Aj keď veľkosť elektromotorickej sily synchrónneho generátora závisí od počtu otáčok rotora, nie je možné ju upraviť zmenou rýchlosti otáčania rotora, pretože frekvencia elektromotorickej sily súvisí s počtom otáčok rotora. otáčky rotora generátora, ktoré sa musia udržiavať konštantné.
Zostáva teda jediný spôsob, ako upraviť veľkosť elektromotorickej sily synchrónneho generátora — ide o zmenu hlavného magnetického toku F. Ten sa zvyčajne dosiahne nastavením budiaceho prúdu iw pomocou reostatu zavedeného do budiaceho obvodu. generátora. V prípade, že je budiaca cievka napájaná prúdom z generátora jednosmerného prúdu umiestneného na rovnakom hriadeli s týmto synchrónnym generátorom, nastavuje sa budiaci prúd synchrónneho generátora zmenou napätia na svorkách generátora jednosmerného prúdu.
Závislosť elektromotorickej sily E synchrónneho generátora na budiacom prúde iw pri konštantných menovitých otáčkach rotora (n = const) a zaťažení rovnajúcom sa nule (1 = 0) sa nazýva voľnobežná charakteristika generátora.
Obrázok 1 znázorňuje charakteristiku generátora bez zaťaženia. Tu je vzostupná vetva 1 krivky odstránená, keď sa prúd iv zvyšuje z nuly na ivm, a zostupná vetva 2 krivky - keď sa iv mení z ivm na iv = 0.
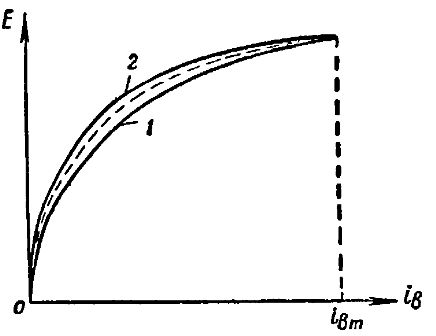
Ryža. 1. Kľudová charakteristika synchrónneho generátora
Divergencia medzi vzostupnou 1 a zostupnou 2 vetvou sa vysvetľuje zvyškovým magnetizmom. Čím väčšia je plocha ohraničená týmito vetvami, tým väčšie sú straty energie v oceli synchrónneho generátora na obrátenie magnetizácie.
Strmosť stúpania krivky voľnobehu v jej počiatočnom priamom úseku charakterizuje magnetický obvod synchrónneho generátora. Čím nižšia je rýchlosť prúdenia ampér-otáčky vo vzduchových medzerách generátora, tým strmšia bude charakteristika voľnobehu generátora za iných podmienok.
Vonkajšie charakteristiky generátora
Koncové napätie zaťaženého synchrónneho generátora závisí od elektromotorickej sily E generátora, úbytku napätia v aktívnom odpore jeho statorového vinutia, úbytku napätia v dôsledku disipačnej samoindukčnej elektromotorickej sily Es a úbytku napätia v dôsledku reakcia armatúry.
Je známe, že disipačná elektromotorická sila Es závisí od disipatívneho magnetického toku Fc, ktorý nepreniká magnetickými pólmi rotora generátora a teda nemení stupeň magnetizácie generátora. Disipačná samoindukčná elektromotorická sila Es generátora je relatívne malá, a preto ju možno prakticky zanedbať. Podľa toho možno tú časť elektromotorickej sily generátora, ktorá kompenzuje disipatívnu samoindukčnú elektromotorickú silu Es považovať prakticky za rovnú nule. .
Odozva kotvy má citeľnejší vplyv na režim činnosti synchrónneho generátora a najmä na napätie na jeho svorkách. Stupeň tohto vplyvu závisí nielen od veľkosti zaťaženia generátora, ale aj od charakteru zaťaženia.
Uvažujme najskôr o vplyve reakcie kotvy synchrónneho generátora pre prípad, keď je záťaž generátora čisto aktívna. Na tento účel zoberieme časť obvodu pracovného synchrónneho generátora znázorneného na obr. 2, a. Tu je znázornená časť statora s jedným aktívnym drôtom na vinutí kotvy a časť rotora s niekoľkými jeho magnetickými pólmi.
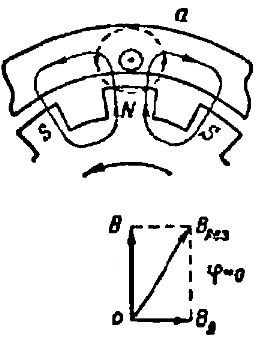
Ryža. 2. Vplyv reakcie kotvy pri zaťažení: a — aktívny, b — indukčný, c — kapacitný charakter
Severný pól jedného z elektromagnetov otáčajúcich sa proti smeru hodinových ručičiek s rotorom práve prechádza pod aktívnym drôtom vinutia statora.
Elektromotorická sila indukovaná v tomto drôte smeruje k nám za rovinu výkresu. A keďže záťaž generátora je čisto aktívna, prúd vinutia kotvy Iz je vo fáze s elektromotorickou silou. Preto v aktívnom vodiči vinutia statora prúdi smerom k nám kvôli rovine výkresu.
Magnetické siločiary vytvorené elektromagnetmi sú tu zobrazené plnými čiarami a magnetické siločiary vytvorené prúdom drôtu vinutia kotvy. - bodkovaná čiara.
Nižšie na obr. 2 je znázornený vektorový diagram magnetickej indukcie výsledného magnetického poľa umiestneného nad severným pólom elektromagnetu. Tu vidíme, že magnetická indukcia V hlavné magnetické pole vytvorené elektromagnetom má radiálny smer a magnetická indukcia VI magnetického poľa prúdu vinutia kotvy smeruje doprava a kolmo na vektor V.
Výsledná magnetická indukcia Rez smeruje nahor a doprava. To znamená, že došlo k určitému skresleniu základného magnetického poľa v dôsledku pridania magnetických polí. Naľavo od severného pólu trochu zoslabol a napravo sa trochu zvýšil.
Je ľahké vidieť, že radiálna zložka výsledného vektora magnetickej indukcie, od ktorej v podstate závisí veľkosť indukovanej elektromotorickej sily generátora, sa nezmenila. Preto reakcia kotvy pri čisto aktívnom zaťažení generátora neovplyvňuje veľkosť elektromotorickej sily generátora.To znamená, že pokles napätia na generátore s čisto aktívnou záťažou je spôsobený výlučne poklesom napätia na aktívnom odpore generátora, ak zanedbáme únikovú samoindukčnú elektromotorickú silu.
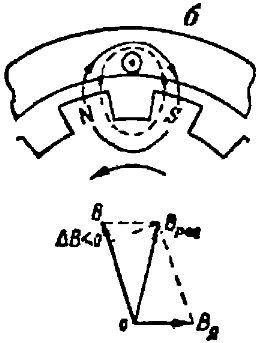
Predpokladajme teraz, že zaťaženie synchrónneho generátora je čisto induktívne. V tomto prípade prúd Az zaostáva za elektromotorickou silou E o uhol π / 2... To znamená, že maximálny prúd sa vo vodiči objaví o niečo neskôr ako maximálna elektromotorická sila. Preto, keď prúd v drôte vinutia kotvy dosiahne svoju maximálnu hodnotu, severný pól N už nebude pod týmto drôtom, ale posunie sa o niečo ďalej v smere otáčania rotora, ako je znázornené na obr. 2, b.
V tomto prípade sú magnetické čiary (bodkované čiary) magnetického toku vinutia kotvy uzavreté cez dva susedné protiľahlé póly N a S a sú nasmerované na magnetické čiary hlavného magnetického poľa generátora vytvoreného magnetickými pólmi. To vedie k tomu, že hlavná magnetická dráha je nielen skreslená, ale aj mierne slabšia.
Na obr. 2.6 je znázornený vektorový diagram magnetických indukcií: hlavné magnetické pole B, magnetické pole v dôsledku reakcie kotvy Vi a výsledné magnetické pole Vres.
Tu vidíme, že radiálna zložka magnetickej indukcie výsledného magnetického poľa sa zmenšila ako magnetická indukcia B hlavného magnetického poľa o hodnotu ΔV. Preto je tiež znížená indukovaná elektromotorická sila, pretože je spôsobená radiálnou zložkou magnetickej indukcie.To znamená, že napätie na svorkách generátora, ak sú ostatné veci rovnaké, bude menšie ako napätie pri čisto aktívnom zaťažení generátora.
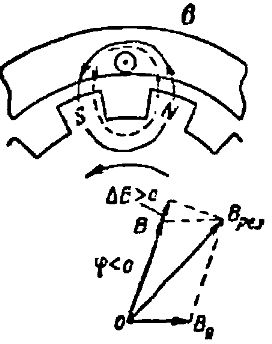
Ak má generátor čisto kapacitnú záťaž, prúd v ňom vedie fázu elektromotorickej sily o uhol π / 2... Prúd vo vodičoch vinutia kotvy generátora teraz dosahuje maximum skôr ako elektromotor. sila E. Preto, keď prúd v drôte vinutia kotvy (obr. 2, c) dosiahne svoju maximálnu hodnotu, severný pól N stále neprijme tento drôt.
V tomto prípade sú magnetické čiary (bodkované čiary) magnetického toku vinutia kotvy uzavreté cez dva susedné protiľahlé póly N a S a sú nasmerované pozdĺž dráhy s magnetickými čiarami hlavného magnetického poľa generátora. To vedie k tomu, že hlavné magnetické pole generátora je nielen skreslené, ale aj trochu zosilnené.
Na obr. 2, c znázorňuje vektorový diagram magnetickej indukcie: hlavné magnetické pole V, magnetické pole v dôsledku reakcie kotvy Vya a výsledné magnetické pole Bres. Vidíme, že radiálna zložka magnetickej indukcie výsledného magnetického poľa je väčšia ako magnetická indukcia B hlavného magnetického poľa o hodnotu ΔB. Preto sa tiež zvýšila indukčná elektromotorická sila generátora, čo znamená, že napätie na svorkách generátora, pričom všetky ostatné podmienky sú rovnaké, bude vyššie ako napätie pri čisto indukčnom zaťažení generátora.
Po zistení vplyvu reakcie kotvy na elektromotorickú silu synchrónneho generátora pre záťaže rôzneho charakteru pristúpime k objasneniu vonkajších charakteristík generátora.Vonkajšou charakteristikou synchrónneho generátora je závislosť napätia U na jeho svorkách od zaťaženia I pri konštantných otáčkach rotora (n = const), konštantnom budiacom prúde (iv = const) a stálosti účinníka (cos φ = const).
Na obr. 3 sú uvedené vonkajšie charakteristiky synchrónneho generátora pre záťaže rôzneho charakteru. Krivka 1 vyjadruje vonkajšiu charakteristiku pri aktívnom zaťažení (cos φ = 1,0). V tomto prípade svorkové napätie generátora klesne, keď sa zaťaženie zmení z voľnobehu na menovité v rozsahu 10 – 20 % napätia generátora naprázdno.
Krivka 2 vyjadruje vonkajšiu charakteristiku s odporovo-indukčnou záťažou (cos φ = 0, osem). V tomto prípade napätie na svorkách generátora rýchlejšie klesá v dôsledku demagnetizačného účinku reakcie kotvy. Keď sa zaťaženie generátora zmení z chodu naprázdno na menovité, napätie klesne na 20 – 30 % napätia naprázdno.
Krivka 3 vyjadruje vonkajšiu charakteristiku synchrónneho generátora pri aktívno-kapacitnom zaťažení (cos φ = 0,8). V tomto prípade sa svorkové napätie generátora trochu zvýši v dôsledku magnetizačného účinku reakcie kotvy.
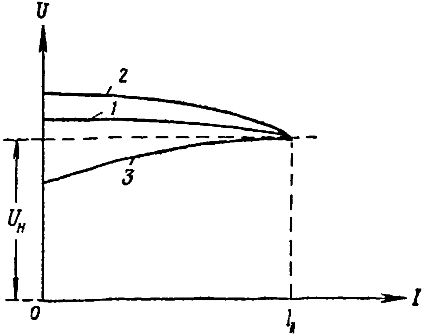
Ryža. 3. Vonkajšie charakteristiky alternátora pre rôzne zaťaženia: 1 — aktívny, 2 — indukčný, 3 kapacitný
Riadiaca charakteristika synchrónneho generátora
Riadiaca charakteristika synchrónneho generátora vyjadruje závislosť budiaceho prúdu i v generátore od záťaže I pri konštantnej efektívnej hodnote napätia na svorkách generátora (U = const), konštantnom počte otáčok rotora. generátora za minútu (n = const) a stálosť činiteľa výkonu (cos φ = const).
Na obr.4 sú uvedené tri riadiace charakteristiky synchrónneho generátora. Krivka 1 sa vzťahuje na aktívny stav zaťaženia (pretože φ = 1).
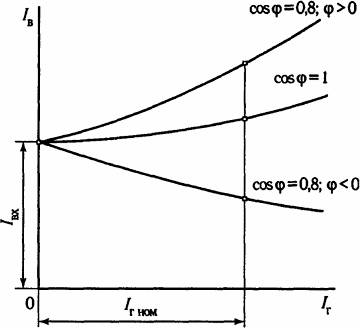
Ryža. 4. Riadiace charakteristiky alternátora pre rôzne záťaže: 1 — aktívny, 2 — indukčný, 3 — kapacitný
Tu vidíme, že so zvyšujúcim sa zaťažením I na generátore sa zvyšuje budiaci prúd. Je to pochopiteľné, pretože so zvyšovaním záťaže I sa zvyšuje úbytok napätia na aktívnom odpore vinutia kotvy generátora a je potrebné zvýšiť elektromotorickú silu E generátora zvýšením budiaceho prúdu iv. udržujte konštantné napätie U.
Krivka 2 sa vzťahuje na prípad aktívneho indukčného zaťaženia pri cos φ = 0,8... Táto krivka stúpa strmšie ako krivka 1, v dôsledku demagnetizácie reakcie kotvy, ktorá znižuje veľkosť elektromotorickej sily E a tým aj napätie U na svorkách generátora.
Krivka 3 sa vzťahuje na prípad aktívneho kapacitného zaťaženia pri cos φ = 0,8. Táto krivka ukazuje, že so zvyšujúcim sa zaťažením generátora je potrebný menší budiaci prúd i v generátore na udržanie konštantného napätia na jeho svorkách. Je to pochopiteľné, pretože v tomto prípade reakcia kotvy zvyšuje hlavný magnetický tok a tým prispieva k zvýšeniu elektromotorickej sily generátora a napätia na jeho svorkách.