Elektrické stroje na striedavý prúd
Elektrické stroje slúžia na premenu mechanickej energie na elektrickú energiu (AC a DC generátory) a naopak (elektromotory).
Vo všetkých týchto prípadoch sa využívajú v podstate tri hlavné objavy v oblasti elektromagnetizmu: fenomén mechanickej interakcie prúdov objavený Amperom v roku 1821, fenomén elektromagnetickej indukcie objavený Faradayom v roku 1831 a teoretické zhrnutie týchto javov uskutočnené Lenz (1834) vo svojom známom zákone o smere indukovaného prúdu (v skutočnosti Lenzov zákon predpovedal zákon zachovania energie pre elektromagnetické procesy).

Na premenu mechanickej energie na elektrickú energiu alebo naopak je potrebné vytvoriť relatívny pohyb vodivého obvodu s prúdom a magnetickým poľom (magnet alebo prúd).
V elektrických strojoch určených na nepretržitú prevádzku sa využíva rotačný pohyb pohyblivej časti stroja (rotora striedavého stroja) umiestnenej vo vnútri stacionárnej časti (statora).Cievka stroja, ktorá slúži na vytváranie magnetického poľa, sa nazýva induktor a cievka, ktorá obteká pracovným prúdom, sa nazýva kotva. Oba tieto termíny sa používajú aj pre jednosmerné stroje.
Pre zvýšenie magnetickej indukcie sú vinutia strojov umiestnené na feromagnetických telesách (oceľ, liatina).
Všetky elektrické stroje majú vlastnosť reverzibility, to znamená, že môžu byť použité ako generátory elektrickej energie, tak aj ako elektromotory.

Asynchrónne motory
Používajú sa asynchrónne motory jeden z prejavov elektromagnetickej indukcie… V kurzoch fyziky sa to demonštruje takto:
Pod medeným kotúčom, ktorý sa môže otáčať okolo zvislej osi prechádzajúcej jeho stredom, je umiestnený vertikálny podkovovitý magnet, ktorý sa otáča okolo rovnakej osi (mechanická interakcia medzi kotúčom a magnetom je vylúčená). V tomto prípade sa disk začne otáčať rovnakým smerom ako magnet, ale nižšou rýchlosťou. Ak zvýšite mechanické zaťaženie disku (napríklad zvýšením trenia nápravy o axiálne ložisko), rýchlosť jeho otáčania sa zníži.
Fyzikálny význam tohto javu sa dá ľahko vysvetliť teóriou elektromagnetickej indukcie: keď sa magnet otáča, vytvára sa rotujúce magnetické pole, ktoré indukuje vírivé prúdy v disku, ktorých veľkosť závisí, ak sú ostatné veci rovnaké, od relatívna rýchlosť poľa a disku.
Podľa Lenzovho zákona sa kotúč musí otáčať v smere poľa. Pri absencii trenia musí disk nadobudnúť uhlovú rýchlosť rovnajúcu sa rýchlosti magnetu, po ktorej indukované emf zmizne. V reálnom živote je nevyhnutne prítomné trenie a disk sa spomalí.Jeho veľkosť závisí od mechanického brzdného momentu, ktorý kotúč zažíva.
Nesúlad medzi rýchlosťou otáčania disku (rotora) a rýchlosťou otáčania magnetického poľa sa odráža v názve motorov.
Princíp činnosti asynchrónnych motorov:
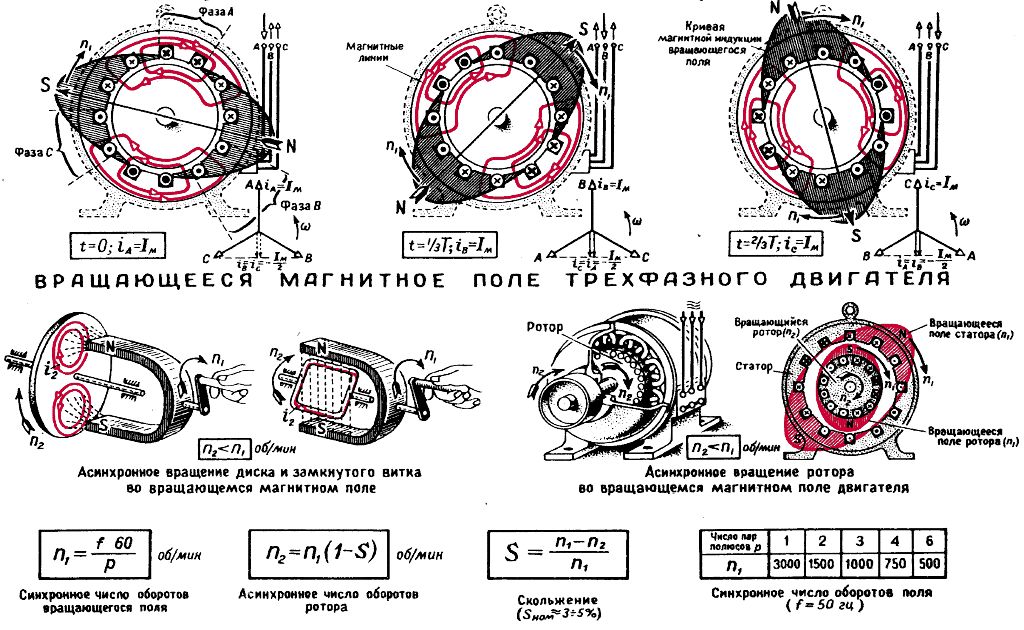
V technických asynchrónnych motoroch (najčastejšie trojfázových) vzniká točivé magnetické pole polyfázový prúdprúdiaci okolo stacionárneho vinutia statora. Pri frekvencii trojfázového prúdu je a počet statorových cievok 3p točivé pole robí n = f/p otáčok/sek.

V dutine statora je umiestnený otočný rotor. Na jeho hriadeľ je možné pripojiť otočný mechanizmus.U najjednoduchších motorov s „veveričkovým“ článkom tvorí rotor sústava pozdĺžnych kovových tyčí uložených v drážkach oceľového valcového telesa. Drôty sú skratované dvoma krúžkami. Na zvýšenie krútiaceho momentu je polomer rotora dostatočne veľký.
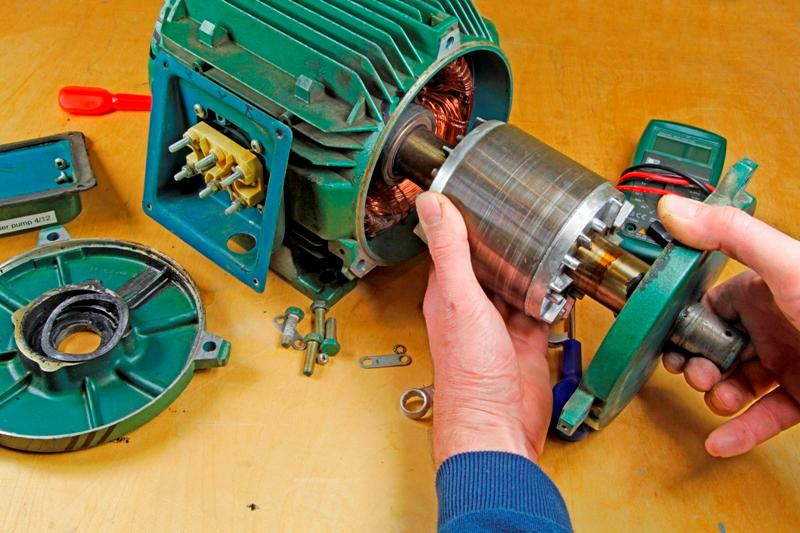
V iných konštrukciách motorov (typicky vysokovýkonné motory) tvoria drôty rotora otvorené trojfázové vinutie. Konce cievok sú skratované v samotnom rotore a vodiče sú vyvedené na tri zberacie krúžky namontované na hriadeli rotora a izolované od neho.
K týmto krúžkom je pomocou posuvných kontaktov (kefy) pripojený trojfázový reostat, ktorý slúži na rozbeh motora. Po otočení motora sa reostat úplne odstráni a rotor sa stane klietkou veveričky (pozri — Asynchrónne motory s vinutým rotorom).

Na telese statora je svorkovnica. K nim sú vyvedené vinutia statora. Môžu byť zahrnuté hviezda alebo trojuholník, v závislosti od sieťového napätia: v prvom prípade môže byť sieťové napätie 1,73-krát vyššie ako v druhom prípade.
Hodnota charakterizujúca relatívne spomalenie rotora v porovnaní so statorovým poľom indukčného motora sa nazýva pošmyknutia… Zmení sa zo 100% (v momente spustenia motora) na nulu (ideálny prípad bezstratového pohybu rotora).
Obrátenie smeru otáčania asynchrónneho motora sa dosiahne vzájomným prepnutím každých dvoch lineárnych vodičov elektrickej siete napájajúcej motor.

Motory vo veveričke sú široko používané v priemysle. Výhodou asynchrónnych motorov je jednoduchosť konštrukcie a absencia posuvných kontaktov.
Až donedávna bola hlavnou nevýhodou takýchto motorov ťažkosti s reguláciou otáčok, pretože ak sa na to zmení napätie obvodu statora, krútiaci moment sa prudko zmení, ale bolo technicky ťažké zmeniť frekvenciu napájacieho prúdu. Moderné mikroprocesorové zariadenia sú teraz široko používané na riadenie frekvencie napájacieho prúdu na zmenu rýchlosti motorov — frekvenčné meniče.
Alternátory
Alternátory sú vyrobené pre značný výkon a vysoké napätie. Rovnako ako asynchrónne stroje majú dve vinutia. Normálne je vinutie kotvy umiestnené v kryte statora. Induktory, ktoré vytvárajú primárny magnetický tok, sú namontované na rotore a sú napájané budičom – malým jednosmerným generátorom namontovaným na hriadeli rotora. Vo vysokovýkonných strojoch je budenie niekedy vytvárané usmerneným striedavým napätím.
V dôsledku nehybnosti vinutia kotvy miznú technické ťažkosti spojené s použitím posuvných kontaktov pri vysokých výkonoch.
Na obrázku nižšie je schéma jednofázového generátora. Jeho rotor má osem pólov. Na nich sú navinuté cievky (na obrázku nie sú zobrazené) napájané z externého zdroja jednosmerným prúdom aplikovaným na zberné krúžky namontované na hriadeli rotora. Pólové cievky sú navinuté tak, že sa striedajú znaky pólov smerujúcich k statoru. Počet pólov musí byť párny.
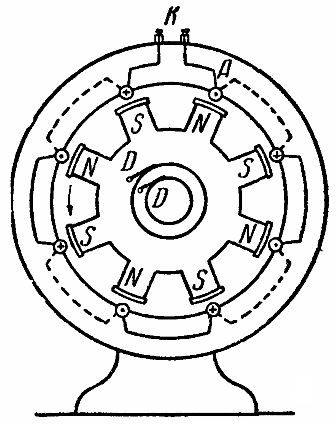
Vinutie kotvy je umiestnené v telese statora. Jeho dlhé pracovné «aktívne» drôty, kolmé na rovinu výkresu, sú na obrázku znázornené krúžkami, pri otáčaní rotora ich pretínajú čiary magnetickej indukcie.
Kruhy znázorňujú okamžité rozloženie smerov indukovaných elektrických polí. Spojovacie vodiče vedúce pozdĺž prednej strany statora sú znázornené plnými čiarami a na zadnej strane prerušovanými čiarami. Svorky K sa používajú na pripojenie externého obvodu k vinutiu statora. Smer otáčania rotora je označený šípkou.
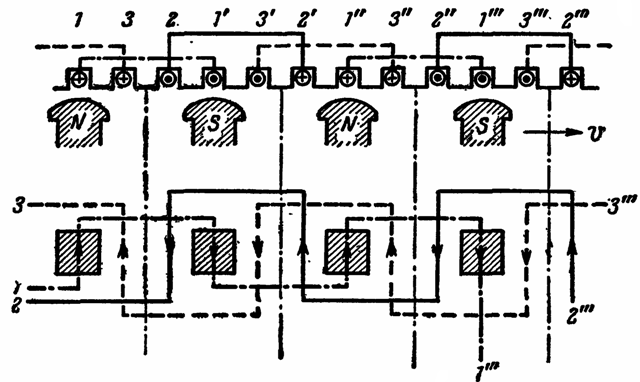
Ak mentálne rozrežete stroj pozdĺž polomeru prechádzajúceho medzi svorkami K a otočíte ho do roviny, potom bude vzájomná poloha vinutia statora a pólov rotora (strana a pôdorys) znázornená schematickým nákresom:
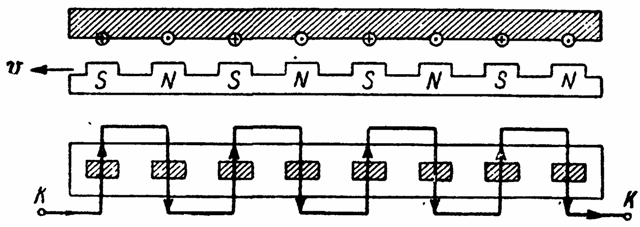
Vzhľadom na obrázok dbáme na to, aby všetky aktívne vodiče (prechádzajúce cez póly induktora) boli navzájom zapojené do série a EMF indukované v nich sú sčítané. Fázy všetkých EMP sú samozrejme rovnaké.Počas jednej úplnej rotácie rotora sa získajú štyri úplné periódy zmeny prúdu v každom z drôtov (a teda vo vonkajšom okruhu).
Ak má elektrický stroj p párov pólov a rotor sa otáča n otáčkami za sekundu, potom frekvencia striedavého prúdu prijímaného strojom je f = pn hz.
Pretože frekvencia EMF v sieti musí byť konštantná, rýchlosť otáčania rotorov musí byť konštantná. Na získanie EMF technickej frekvencie (50 Hz) je možné použiť relatívne pomalé otáčanie, ak je počet pólov rotora dostatočne veľký.
Na získanie trojfázového prúdu sú v tele statora umiestnené tri samostatné vinutia. Každý z nich je posunutý voči ostatným dvom o tretinu oblúkovej vzdialenosti medzi susednými (protiľahlými) pólmi induktorov.
Je ľahké overiť, že keď sa induktory otáčajú, EMF sa indukujú v cievkach posunutých vo fáze (v čase) o 120 °. Konce cievok sú odstránené zo stroja a môžu byť spojené do hviezdy alebo trojuholníka.
V generátore je relatívna rýchlosť poľa a vodiča určená priemerom rotora, počtom otáčok rotora za sekundu a počtom pólových párov.

Ak je generátor poháňaný vodným prúdom (hydrogenerátor), zvyčajne sa vyrába s pomalými otáčkami. Na získanie požadovanej frekvencie prúdu je potrebné zvýšiť počet pólov, čo zase vyžaduje zväčšenie priemeru rotora.
Z viacerých technických dôvodov výkonné vodíkové generátory zvyčajne majú vertikálny hriadeľ a sú umiestnené nad hydraulickou turbínou, čo spôsobuje ich otáčanie.

Generátory poháňané parnými turbínami — Turbínové generátory sú zvyčajne vysokorýchlostné. Aby sa zmenšili mechanické sily, majú malé priemery a tomu zodpovedajúco malý počet pólov.Mnoho technických úvah vyžaduje výrobu turbínových generátorov s horizontálnym hriadeľom.
Ak je generátor poháňaný spaľovacím motorom, nazýva sa dieselový generátor, pretože dieselové motory sa vo všeobecnosti používajú ako motory, ktoré spotrebúvajú lacnejšie palivo.

Reverzibilita generátora, synchrónne motory
Ak sa na statorové vinutie generátora privedie striedavé napätie z externého zdroja, dôjde k interakcii pólov induktora s magnetickým poľom prúdu generovaného v statore a budú pôsobiť krútiace momenty z rovnakého smeru. na všetkých póloch.
Ak sa rotor otáča takou rýchlosťou, že krátko po polovici periódy striedavého prúdu sa pod uvažovaný drôt vinutia statora vojde ďalší pól tlmivky (v znamienku opačne k prvému pólu), potom znamienko vinutia sila interakcie medzi ním a prúdom, ktorý zmenil svoj smer, zostane rovnaká.
Za týchto podmienok sa rotor, ktorý je pod neustálym vplyvom krútiaceho momentu, bude naďalej pohybovať a bude schopný poháňať akýkoľvek mechanizmus. K prekonaniu odporu voči pohybu rotora dôjde v dôsledku energie spotrebovanej sieťou a generátor sa stane elektromotorom.

Treba však poznamenať, že kontinuálny pohyb je možný len pri presne definovanej rýchlosti otáčania, pretože v prípade odchýlky od nej bude na každý z pólov rotora pôsobiť čiastočne zrýchľujúci moment, ktorý sa pohybuje medzi dvoma vodičmi rotora. stator, časť času - zastavenie .
Rýchlosť otáčania motora teda musí byť presne určená, — čas, počas ktorého je pól nahradený ďalším, sa musí zhodovať s polovičnou periódou prúdu, preto sa takéto motory nazývajú synchrónne.
Ak sa na statorové vinutie so stacionárnym rotorom privedie striedavé napätie, potom, hoci všetky póly rotora počas prvej polovice cyklu prúdu zažijú pôsobenie krútiacich momentov rovnakého znamienka, stále v dôsledku zotrvačnosti rotor nebude mať čas na pohyb. V nasledujúcom polcykle sa znamienko krútiacich momentov pre všetky póly rotora zmení na opačné.
V dôsledku toho bude rotor vibrovať, ale nebude sa môcť otáčať. Preto musí byť synchrónny motor najskôr navinutý, to znamená privedený na normálny počet otáčok, a až potom by sa mal zapnúť prúd vo vinutí statora.
Vývoj synchrónnych motorov sa uskutočňuje mechanickými metódami (pri nízkych výkonoch) a špeciálnymi elektrickými zariadeniami (pri vysokých výkonoch).
Pri malých zmenách zaťaženia sa otáčky motora automaticky zmenia, aby sa prispôsobili novému zaťaženiu. Takže keď sa zvýši zaťaženie hriadeľa motora, rotor sa okamžite spomalí. Preto sa mení fázový posun medzi sieťovým napätím a opačne indukovaným EMF indukovaným induktorom vo vinutí statora.
Reakcia kotvy navyše vytvára demagnetizáciu induktorov, takže statorový prúd sa zvyšuje, induktory zažívajú zvýšený krútiaci moment a motor sa opäť začne otáčať synchrónne, čím prekoná zvýšené zaťaženie. Podobný proces nastáva pri znižovaní zaťaženia.
Pri prudkých výkyvoch záťaže môže byť táto prispôsobivosť motora nedostatočná, jeho otáčky sa výrazne zmenia, "vypadne zo synchronizácie" a nakoniec sa zastaví, zatiaľ čo indukčné EMF indukované v statore zmizne a prúd v ňom sa zvýši ostro. Preto sa treba vyhýbať prudkým výkyvom zaťaženia. Na zastavenie motora musíte najskôr odpojiť obvod statora a potom odpojiť tlmivky; pri štartovaní motora musíte postupovať v opačnom poradí.
Synchrónne motory sa najčastejšie používajú na pohon mechanizmov, ktoré pracujú s konštantnou rýchlosťou. Tu sú výhody a nevýhody synchrónnych motorov a spôsoby ich spúšťania: Synchrónne motory a ich aplikácie
Náučný filmový pás - "Synchrónne motory", vytvorený továrňou na vzdelávacie a vizuálne pomôcky v roku 1966. Môžete si ho pozrieť tu: Filmový pás «Synchrónny motor»
