Čo je lineárny diferenciálny transformátor
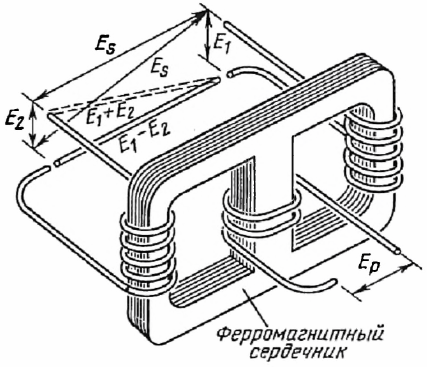
Striedavý prúd tečúci v jednej primárnej cievke môže byť použitý na indukciu striedavého napätia v dvoch sekundárnych cievkach. Ak sú dve sekundárne vinutia identické vo svojich charakteristikách a dve dráhy magnetických siločiar prechádzajúcich týmito cievkami sú tiež identické, potom budú dve generované sekundárne napätia rovnaké. Zariadenie s touto štruktúrou sa nazýva diferenciálny transformátor.

Diferenciálny transformátor môže mať vzduchové jadro alebo magnetické jadro.
Dve sekundárne vinutia môžu byť zapojené buď vo fáze alebo proti fáze, v prvom prípade sa ich napätia navzájom sčítajú a v druhom prípade sa jedno od druhého odčítava.
Primárne vinutie sa používa na pohon dvoch symetrických sekundárnych vinutí, z ktorých druhé možno pripojiť tak, že sekundárne napätia sa navzájom sčítavajú alebo uberajú.
Ak sú dve cievky pripojené podľa schémy odčítania, potom pri rovnakých hodnotách ich napätí bude celkové sekundárne napätie nulové.Ak sú charakteristiky magnetického obvodu jednej z týchto cievok zámerne zmenené v porovnaní s charakteristikami magnetického obvodu druhej cievky, potom sa tieto dve sekundárne napätia budú líšiť a ich rozdiel nebude nulový.
Za týchto podmienok fáza celkového sekundárneho napätia udáva, ktorá dráha magnetických siločiar má najväčší odpor, pričom amplitúda tohto napätia odráža hodnotu rozdielu reluktancie.
Ak sa rovnaká akcia použije na zvýšenie magnetického odporu jednej cesty a zníženie magnetického odporu druhej cesty, potom výstupné napätie odrážajúce túto akciu dosiahne svoju maximálnu hodnotu a prenosová funkcia bude mať najväčšiu možnú linearitu.
Pretože žiadne dve sekundárne vinutia a žiadne dve dráhy magnetických siločiar nemôžu byť vyrobené presne rovnaké, diferenciálny transformátor má vždy určité výstupné napätie, dokonca aj s nulovým užitočným signálom na vstupe.
Okrem toho sú charakteristiky magnetických obvodov nelineárne. V dôsledku tejto nelinearity sa objavujú aj harmonické zložky základnej frekvencie privádzaného primárneho budiaceho napätia, ktoré nie je možné plne kompenzovať pri žiadnom usporiadaní sekundárnych vinutí.
Reluktancia feromagnetického obvodu so vzduchovou medzerou je funkciou šírky medzery so silnou nelinearitou. V dôsledku toho je indukčnosť cievky navinutej okolo takéhoto obvodu tiež nelineárnou funkciou šírky medzery.
Súčasne, ak existujú dve viac-menej rovnaké dráhy magnetických siločiar, každá so vzduchovou medzerou, a ak sa šírka jednej medzery zväčšuje, keď sa šírka druhej zmenšuje, potom rozdiel v magnetickom odpore týchto dráhy sa môžu meniť dostatočne lineárne.
Základné princípy diferenciálneho transformátora sú v praxi stelesnené v rôznych špecifických konštrukčných konfiguráciách pre mnoho rôznych účelov.
Lineárny variabilný diferenciálny transformátor (LVDT) je pasívny prevodník (senzor), ktorý pracuje na princípe vzájomnej indukcie a je možné pomocou neho merať posun, deformáciu, tlak a hmotnosť.
Najčastejšie sa pomocou NS dá merať posunutie v rozsahu niekoľkých milimetrov až centimetrov, čím sa posun priamo prevedie na elektrický signál.
Indukčnosť cievky v blízkosti alebo vnútri, v ktorej sa nachádza feromagnetická tyč, je funkciou súradnice polohy tejto tyče vzhľadom na cievku so silnou nelinearitou.
Ak je takáto tyč feromagnetickým obvodom nejakého diferenciálneho transformátora, potom sekundárne diferenciálne napätie môže slúžiť ako indikátor posunu tyče, v závislosti od tohto posunu dostatočne lineárne.
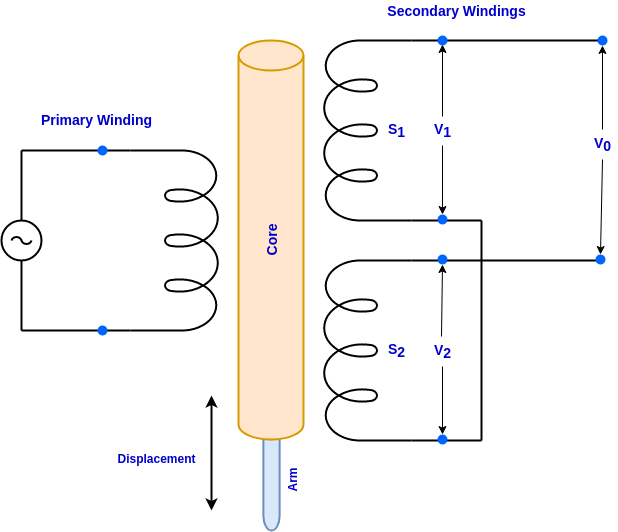
Primárne vinutie je pripojené k zdroju striedavého prúdu. Dve sekundárne vinutia S1 a S2 majú rovnaký počet závitov a sú namontované v sérii oproti sebe.
EMP indukované v týchto vinutiach je teda navzájom fázovo posunuté o 180° a tým sa celkový efekt ruší.

Polohu symetrického feromagnetického jadra poskytnutého v konštrukcii diferenciálneho transformátora je možné určiť z fázy a amplitúdy sekundárneho napätia.
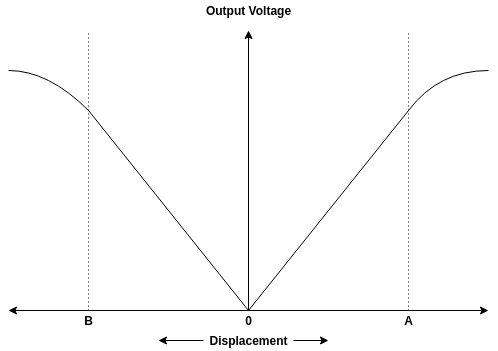
Absolútny rozdiel medzi dvoma sekundárnymi napätiami udáva absolútnu hodnotu posunutia tyče vzhľadom na stredovú alebo nulovú polohu a fáza tohto rozdielneho napätia udáva smer posunutia.
Krivka B / I lineárneho variabilného diferenciálneho transformátora je znázornená na obrázku.
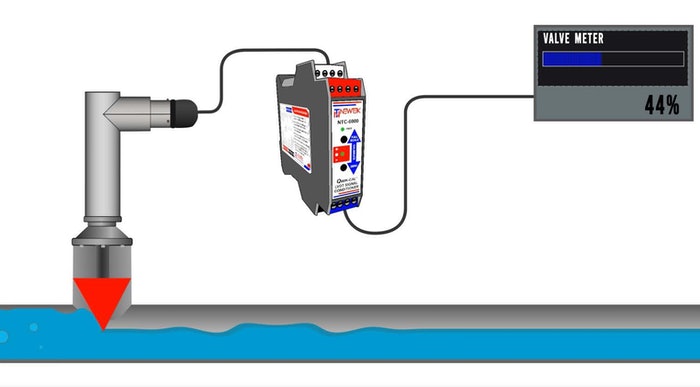
Príklad použitia lineárneho diferenciálneho transformátora na poskytnutie presnej spätnej väzby polohy pre monitorovanie a riadenie ventilov v chemických závodoch, elektrárňach a poľnohospodárskych zariadeniach:
Ponorné snímače posunu LVDT D5W:
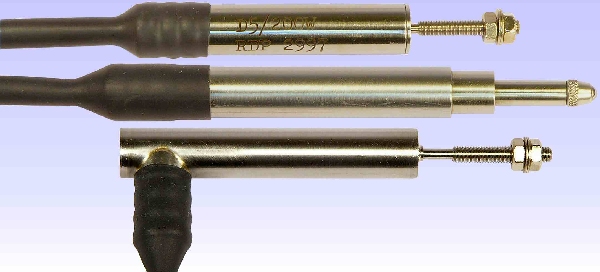
Tieto prevodníky sú určené na meranie posunutia a polohy. Poskytujú presné meranie polohy kotvy (posuvnej časti) vzhľadom na puzdro snímača posunu.
Ponorné snímače posunu sú navrhnuté tak, aby vykonávali merania pri ponorení do vhodných kvapalín. Nemagnetické kvapaliny môžu zaplaviť rúrku kotvy bez ovplyvnenia činnosti meniča. Tieto meniče sú k dispozícii vo verziách s neriadeným alebo s vratným pružinou.
Pri automatizácii rôznych technologických procesov sa často používajú bilaterálne meniče s diferenciálnym transformátorom s feromagnetickým jadrom, ktoré je na svojich koncoch vložené v rovnakých vzdialenostiach do dvoch sekundárnych cievok.
Pri axiálnom pohybe tyče sa posúva hlbšie do jednej z týchto cievok a vysúva sa z druhej.Absolútny rozdiel medzi dvoma sekundárnymi napätiami udáva absolútnu hodnotu posunutia tyče vzhľadom na stredovú alebo nulovú polohu a fáza tohto rozdielneho napätia udáva smer posunutia.
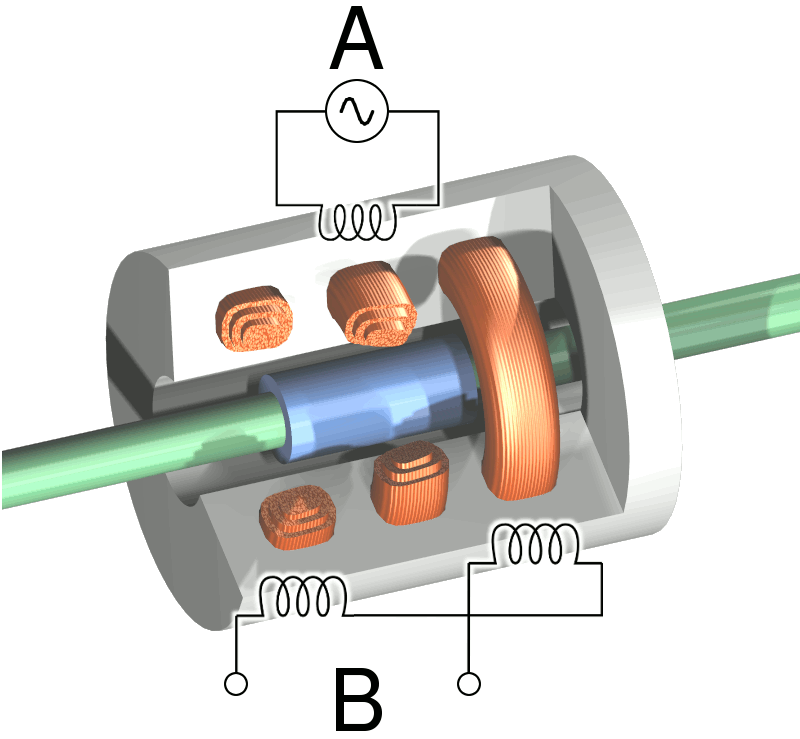
Rotačný AC diferenciálny transformátor:
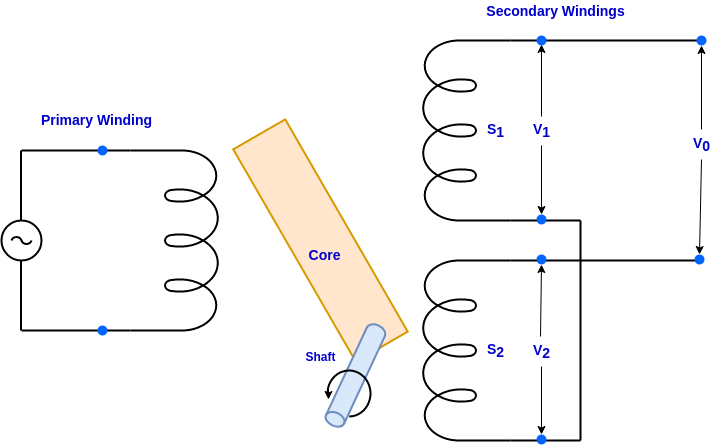
Rotačný variabilný diferenciálny transformátor je pasívny transformátor založený na princípe vzájomnej indukcie. Používa sa na meranie uhlového posunu.
Jeho konštrukcia je podobná ako pri lineárnom variabilnom diferenciálnom transformátore, s výnimkou konštrukcie jadra.
Primárne vinutie je pripojené k zdroju striedavého prúdu. Dve sekundárne vinutia S1 a S2 majú rovnaký počet závitov a sú namontované v sérii oproti sebe.
Výhody lineárneho diferenciálneho transformátora:
-
Medzi jadrom a cievkami nedochádza k fyzickému kontaktu;
- Vysoká spoľahlivosť;
-
Rýchla odozva;
-
Dlhá životnosť.
Je to najpoužívanejší indukčný snímač vďaka vysokej presnosti.