Mechanické vlastnosti elektromotorov a výrobných mechanizmov
 Pri návrhu elektrického pohonu treba elektromotor zvoliť tak, aby jeho mechanické vlastnosti zodpovedali mechanickým vlastnostiam výrobného mechanizmu. Mechanické charakteristiky udávajú vzťah premenných v ustálenom stave.
Pri návrhu elektrického pohonu treba elektromotor zvoliť tak, aby jeho mechanické vlastnosti zodpovedali mechanickým vlastnostiam výrobného mechanizmu. Mechanické charakteristiky udávajú vzťah premenných v ustálenom stave.
Mechanická charakteristika mechanizmu sa nazýva vzťah medzi uhlovou rýchlosťou a momentom odporu mechanizmu, redukovaný na hriadeľ motora) ω = f (Mc).
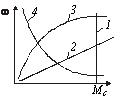
Ryža. 1. Mechanické charakteristiky mechanizmov
Medzi celou odrodou existuje niekoľko charakteristických typov mechanických charakteristík mechanizmov:
1. Charakteristika s momentom odporu nezávislým od rýchlosti (priama čiara 1 na obr. 1). Mechanická charakteristika nezávislá od rýchlosti je nakreslená ako priamka rovnobežná s osou otáčania, v tomto prípade zvislou. Takúto charakteristiku majú napríklad žeriavy, navijaky, piestové čerpadlá s konštantnou dopravnou výškou atď.
2.Charakteristika s momentom odporu lineárne závislým od rýchlosti (riadok 2 na obr. 1). Táto závislosť je vlastná napríklad pohonu nezávisle budeného generátora jednosmerného prúdu pracujúceho pri konštantnej záťaži.
3. Charakteristické s nelineárnym nárastom krútiaceho momentu (krivka 3 na obr. 1). Typickými príkladmi sú chod ventilátorov, odstredivých čerpadiel, vrtúľ. Pre tieto mechanizmy závisí moment Mc od druhej mocniny uhlovej rýchlosti ω... Ide o tzv. parabolická (ventilátorová) mechanická charakteristika.
4. Charakteristika s nelineárne klesajúcim momentom odporu (krivka 4 na obr. 1). V tomto prípade je odporový moment nepriamo úmerný rýchlosti otáčania. V tomto prípade zostáva výkon konštantný v celom rozsahu prevádzkových otáčok mechanizmu. Napríklad v mechanizmoch hlavného pohybu niektorých strojov na rezanie kovov (sústruženie, frézovanie, vŕtanie) sa moment Mc mení nepriamo úmerne k ω a výkon spotrebovaný mechanizmom zostáva konštantný.
Mechanická charakteristika elektromotora sa nazýva závislosť jeho uhlovej rýchlosti od krútiaceho momentu ωd = f (M). Tu je potrebné mať na pamäti, že moment M na hriadeli motora, bez ohľadu na smer otáčania, má kladné znamienko - moment pohybu. Moment odporu Mc má zároveň záporné znamienko.
Ako príklady, obr. 2 ukazuje mechanické charakteristiky: 1 — synchrónny motor; 2 — jednosmerný motor s nezávislým budením; 3 — Jednosmerný motor so sériovým budením.
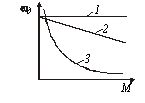 Ryža. 2. Mechanické vlastnosti elektromotorov
Ryža. 2. Mechanické vlastnosti elektromotorov
Na vyhodnotenie vlastností mechanických charakteristík elektrického pohonu sa používa pojem charakteristická tuhosť.Tuhosť mechanickej charakteristiky je určená výrazom
p = dM/dco
kde dM – zmena krútiaceho momentu motora; dωd — zodpovedajúca zmena uhlovej rýchlosti.
Pre lineárne charakteristiky zostáva hodnota β konštantná, pre nelineárne závisí od pracovného bodu.
Pomocou tohto konceptu sú funkcie znázornené na obr. 2, možno kvalitatívne zhodnotiť takto: 1 — absolútne rigidné (β = ∞); 2 — pevné; 3 — mäkké.
Absolútne náročná charakteristika — rýchlosť otáčania motora zostáva nezmenená, keď sa zaťaženie motora zmení z nuly na nominálnu. Synchrónne motory majú túto vlastnosť.
Pevná charakteristika — rýchlosť otáčania sa mení málo, keď sa zaťaženie mení z nuly na nominálnu. Túto charakteristiku má paralelne budený jednosmerný motor, ako aj indukčný motor v oblasti lineárnej časti charakteristiky.
Za tuhú charakteristiku sa považuje taká, pri ktorej zmena otáčok nepresiahne približne 10 % menovitých otáčok pri zmene zaťaženia z nuly na menovité.
Mäkká charakteristika — otáčky motora sa výrazne menia pri relatívne malých zmenách zaťaženia. Túto charakteristiku má jednosmerný motor so sériovým, zmiešaným alebo paralelným budením, ale s dodatočným odporom v obvode kotvy, ako aj asynchrónnym s odporom v obvode rotora.
Pre väčšinu výrobných mechanizmov sa používajú asynchrónne motory s kotvou nakrátko, ktoré majú pevné mechanické vlastnosti.
Všetky mechanické vlastnosti elektromotorov sú rozdelené na prirodzené a umelé.
Prirodzené mechanické charakteristiky sa vzťahujú na prevádzkové podmienky motora s menovitými hodnotami parametrov.
Napríklad pre motor s paralelným budením je možné vykresliť prirodzenú charakteristiku pre prípad, keď napätie kotvy a budiaci prúd majú nominálne hodnoty a v obvode kotvy nie je žiadny dodatočný odpor.
Prirodzená charakteristika indukčného motora zodpovedá menovitému napätiu a menovitej frekvencii striedavého prúdu dodávaného do statora motora za predpokladu, že v obvode rotora nie je žiadny dodatočný odpor.
Pre každý motor tak možno postaviť len jednu prirodzenú charakteristiku a neobmedzený počet umelých. Napríklad každá nová hodnota odporu kotvy jednosmerného motora alebo v obvode rotora indukčného motora má svoje vlastné mechanické vlastnosti.
