Výkonné jednosmerné motory a tachogenerátory
Jednosmerné výkonné motory
 Jednosmerné servopohony sú nízkoenergetické stroje používané v automatizácii a telemechanike, v automatických riadiacich, regulačných a riadiacich systémoch automatizovaných inštalácií, kde premieňajú elektrický signál meracieho zariadenia – riadiace napätie – na uhlový pohyb hriadeľa na ovplyvnenie riadiacich, regulačných alebo riadiacich prístrojov... V prípadoch, keď vstupný signál nestačí na pohon hnacieho motora, používa sa magnetický alebo polovodičový výkonový zosilňovač.
Jednosmerné servopohony sú nízkoenergetické stroje používané v automatizácii a telemechanike, v automatických riadiacich, regulačných a riadiacich systémoch automatizovaných inštalácií, kde premieňajú elektrický signál meracieho zariadenia – riadiace napätie – na uhlový pohyb hriadeľa na ovplyvnenie riadiacich, regulačných alebo riadiacich prístrojov... V prípadoch, keď vstupný signál nestačí na pohon hnacieho motora, používa sa magnetický alebo polovodičový výkonový zosilňovač.
Hnacie motory zvyčajne pracujú s častými štartmi, zastaveniami a spätným chodom. Vyznačujú sa výrazným rozbehovým momentom a rýchlosťou. Vo väčšine prípadov sú závislosti krútiaceho momentu kotvy a otáčok na riadiacom napätí blízke lineárnym.
 V závislosti od systému napájania elektrických obvodov sa rozlišujú hnacie motory riadené kotvou a pólové.Pri regulácii kotvy je riadiace vinutie vinutie kotvy, v spojení s ktorým je na jeho svorky privádzané riadiace napätie a konštantný budiaci prúd poskytuje nezávislý zdroj elektrickej energie konštantného napätia. V prípade pólového ovládania slúži riadiaca cievka ako primárna pólová budiaca cievka a na jej svorky je privádzané riadiace napätie a svorkové napätie kotvy nastavené nezávislým zdrojom jednosmerného napätia zostáva nezmenené.
V závislosti od systému napájania elektrických obvodov sa rozlišujú hnacie motory riadené kotvou a pólové.Pri regulácii kotvy je riadiace vinutie vinutie kotvy, v spojení s ktorým je na jeho svorky privádzané riadiace napätie a konštantný budiaci prúd poskytuje nezávislý zdroj elektrickej energie konštantného napätia. V prípade pólového ovládania slúži riadiaca cievka ako primárna pólová budiaca cievka a na jej svorky je privádzané riadiace napätie a svorkové napätie kotvy nastavené nezávislým zdrojom jednosmerného napätia zostáva nezmenené.
Zvyčajne sa používa kotvové riadenie. Obrátenie polarity riadiaceho napätia spôsobí otáčanie kotvy v opačnom smere.
Výkonné jednosmerné motory sa vyrábajú s menovitým výkonom od zlomku wattu do 600 W v bežných a špeciálnych prevedeniach.
 Motory bežnej konštrukcie sú podobné jednosmerným strojom na všeobecné použitie, ale líšia sa od nich tým, že rám s hlavnými pólmi, podobne ako kotva, je zostavený z tenkých plechov z elektroocele, ktoré sú navzájom izolované, čo zlepšuje vlastnosti týchto strojov. v prechodných podmienkach. Okrem toho v týchto strojoch nie sú žiadne ďalšie póly, pretože reakcia kotvy je malá a spínacie procesy sú úplne uspokojivé. Pretože rýchlosť kotvy je nízka, na hriadeli takýchto motorov nie je žiadny ventilátor.
Motory bežnej konštrukcie sú podobné jednosmerným strojom na všeobecné použitie, ale líšia sa od nich tým, že rám s hlavnými pólmi, podobne ako kotva, je zostavený z tenkých plechov z elektroocele, ktoré sú navzájom izolované, čo zlepšuje vlastnosti týchto strojov. v prechodných podmienkach. Okrem toho v týchto strojoch nie sú žiadne ďalšie póly, pretože reakcia kotvy je malá a spínacie procesy sú úplne uspokojivé. Pretože rýchlosť kotvy je nízka, na hriadeli takýchto motorov nie je žiadny ventilátor.
Medzi motory špeciálnej konštrukcie patria magnetoelektrické stroje s budením hlavného magnetického poľa pomocou permanentných magnetov, ako aj stroje s nízkou zotrvačnosťou, ktoré sa líšia konštrukciou kotvy.K tým druhým patria: motory s dutou nemagnetickou kotvou - dutý tenkostenný plastový valec s lisovanou cievkou z medeného drôtu s vnútorným pevným feromagnetickým magnetickým obvodom namontovaným na ložiskovom štíte a menej odolné motory s kotúčovou kotvou - a tenký nemagnetický kotúč z keramiky, textolitu, skla a niekedy aj hliníka s potlačenou cievkou, čo je súprava medených fóliových drôtov, radiálne umiestnených po oboch stranách kotúča, po ktorých sa kĺžu strieborno-grafitové štetce. sa vyznačujú nízkym momentom zotrvačnosti kotvy, ktorý zabezpečuje vysokú rýchlosť výkonného motora.

Hmotnosť jednosmerných výkonných motorov je 2-4 krát menšia ako hmotnosť asynchrónnych výkonných motorov s rovnakým menovitým výkonom a ich účinnosť pri menovitom výkone 5 ... 10 W je asi 0,3 a dosahuje hodnotu 0,65 a trochu. vyššie pre motory s menovitým výkonom 200 — 300 W.

DC tachogenerátory
 Jednosmerné tachogenerátory sú nízkoenergetické stroje určené na premenu mechanickej hodnoty na elektrický signál – výstupné napätie. Používajú sa najmä na riadenie a meranie otáčok hnacieho hriadeľa, ku ktorému je pripojený hriadeľ tachogenerátora, ktorého kotvové svorky sú spojené s meracím zariadením. Okrem toho sa tachogenerátory používajú v elektromechanických výpočtových zariadeniach na vykonávanie výpočtových operácií, ako aj v zariadeniach na automatické spracovanie generovaných akceleračných a tlmiacich signálov.
Jednosmerné tachogenerátory sú nízkoenergetické stroje určené na premenu mechanickej hodnoty na elektrický signál – výstupné napätie. Používajú sa najmä na riadenie a meranie otáčok hnacieho hriadeľa, ku ktorému je pripojený hriadeľ tachogenerátora, ktorého kotvové svorky sú spojené s meracím zariadením. Okrem toho sa tachogenerátory používajú v elektromechanických výpočtových zariadeniach na vykonávanie výpočtových operácií, ako aj v zariadeniach na automatické spracovanie generovaných akceleračných a tlmiacich signálov.
Tachogenerátory sú magnetoelektrické s budením hlavného magnetického poľa pomocou permanentných magnetov a elektrodynamické s elektromagnetickým budením vplyvom magnetického poľa. budiaca cievka napájaná nezávislým zdrojom jednosmerného napätia.
Výstupné napätie tachogenerátora v kľudovom režime sa mení lineárne s otáčkami kotvy a pri zaťažení je táto linearita trochu narušená, a to čím viac, tým menší odpor má merací prístroj pripojený na svorky kotvy. Napriek tomu pre každý tachogenerátor existuje relatívne malý rozsah meraných otáčok, v rámci ktorého pri dostatočne veľkom odpore meracieho zariadenia a konštantných podmienkach budiaceho obvodu možno výstupnú charakteristiku považovať za prakticky lineárnu.
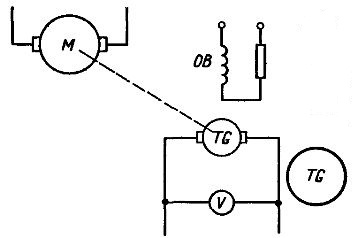
Schéma zapojenia jednosmerného tachogenerátora nezávislého budenia
 Významnou nevýhodou jednosmerných tachogenerátorov je kolísanie výstupného napätia v dôsledku miernej periodickej zmeny magnetického toku v dôsledku nerovnomernej vzduchovej medzery a nerovnakej vodivosti kotvy v rôznych radiálnych smeroch, vrátane tých, ktoré sú spôsobené štruktúrou zubov jej magnetického obvodu, ako aj v dôsledku vibrácií kief, drsnosti a elipsovitosti kolektora a spínacích procesov — do značnej miery eliminovaných v tachogenerátore s dutou kotvou, ktorý je konštruovaný rovnako ako výkonný jednosmerný motor s nízkou zotrvačnosťou a podobná armatúra.
Významnou nevýhodou jednosmerných tachogenerátorov je kolísanie výstupného napätia v dôsledku miernej periodickej zmeny magnetického toku v dôsledku nerovnomernej vzduchovej medzery a nerovnakej vodivosti kotvy v rôznych radiálnych smeroch, vrátane tých, ktoré sú spôsobené štruktúrou zubov jej magnetického obvodu, ako aj v dôsledku vibrácií kief, drsnosti a elipsovitosti kolektora a spínacích procesov — do značnej miery eliminovaných v tachogenerátore s dutou kotvou, ktorý je konštruovaný rovnako ako výkonný jednosmerný motor s nízkou zotrvačnosťou a podobná armatúra.
Nepresnosť inštalácie kefiek na geometrickej neutralite kolektora tachometra vedie k asymetrii výstupného napätia, t.j.na generovanie dvoch rôznych napätí vo vinutí kotvy v opačných smeroch jej otáčania pri rovnakej rýchlosti. Pri správnom usporiadaní kief je napäťová asymetria v rozmedzí 0,3 až 1 % menovitého napätia tachogenerátora.