Mechanické vlastnosti elektrických pohonov
 Voľba elektrického pohonu je daná požiadavkami pracovného stroja. Elektrický pohon musí zabezpečiť, aby pracovný stroj vykonával určenú technológiu vo všetkých možných režimoch: spúšťanie, prijímanie a vykladanie záťaže, zastavovanie, zmena otáčok, konštantná záťaž. Charakter týchto režimov je určený najmä mechanickými vlastnosťami motora a pracovného stroja... Jedným z hlavných kritérií hodnotenia mechanických vlastností motora aj pracovného stroja sú ich mechanické vlastnosti.
Voľba elektrického pohonu je daná požiadavkami pracovného stroja. Elektrický pohon musí zabezpečiť, aby pracovný stroj vykonával určenú technológiu vo všetkých možných režimoch: spúšťanie, prijímanie a vykladanie záťaže, zastavovanie, zmena otáčok, konštantná záťaž. Charakter týchto režimov je určený najmä mechanickými vlastnosťami motora a pracovného stroja... Jedným z hlavných kritérií hodnotenia mechanických vlastností motora aj pracovného stroja sú ich mechanické vlastnosti.
Mechanické vlastnosti elektromotorov
Mechanická charakteristika elektromotora je závislosť rýchlosti otáčania hriadeľa od krútiaceho momentu vyvinutého motorom ω=φ(Md) alebo n = e(Md) kde ω — uhlová rýchlosť otáčania hriadeľa, rad / s, n — rýchlosť otáčania hriadeľa, ot./min
Mechanická charakteristika motora sa nazýva prirodzená závislosť n = f (M) získaná s menovitými parametrami elektrickej siete, normálnou schémou zapojenia a bez dodatočných odporov v elektrickom obvode.
Ak existujú dodatočné odpory alebo je motor napájaný zo siete s iným napätím alebo frekvenciou ako je menovitá, mechanické charakteristiky motora sa budú nazývať umelé... Je zrejmé, že motor má nekonečné množstvo umelých charakteristík a iba jeden prírodný.
Väčšina elektromotorov pri zaťažení znižuje rýchlosť so zvyšujúcim sa krútiacim momentom. Charakteristika sa v tomto prípade nazýva padanie... Mieru zmeny otáčok motora so zmenou krútiaceho momentu odhadujeme pomocou takzvanej tuhosti mechanických charakteristík, ktorá je určená pomerom α = ΔM / Δω alebo α = ΔM / Δн
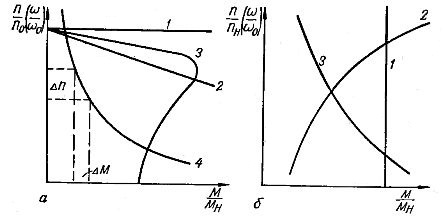
Ryža. 1. Rôzne typy mechanických charakteristík: a — elektromotory, b — výrobné stroje.
Hodnoty zmeny momentu a rýchlosti poklesu pri určovaní tuhosti sa zvyčajne berú v relatívnych jednotkách. To umožňuje porovnávať charakteristiky rôznych typov motorov.
V závislosti od stupňa tuhosti sú všetky mechanické charakteristiky motorov rozdelené do nasledujúcich skupín.
1. Absolútne ťažký výkon s hodnotou tuhosti α = ∞… Synchrónne motory majú také mechanické charakteristiky (krivka 1, obr. 1, a) s prísne konštantnou rýchlosťou otáčania.
2. Pevná charakteristika s relatívne malým poklesom otáčok so zvyšujúcim sa krútiacim momentom a α = 40 — 10.Do tejto skupiny patria prirodzené charakteristiky jednosmerných motorov s nezávislým budením (krivka 2) a charakteristiky indukčných motorov v lineárnom úseku (krivka 3).
3. Mäkké mechanické charakteristiky s veľkým relatívnym poklesom otáčok s rastúcim krútiacim momentom a s tuhosťou do α = 10. Takéto charakteristiky majú jednosmerné motory so sériovým budením (krivka 4), nezávisle budené motory s vysokým odporom kotvy a asynchrónne motory s prídavnými odpormi v obvode rotora.
Počas prevádzky elektrického pohonu, aby prekonal odpor pracovného stroja, musí motor vyvinúť určitý moment. Preto je pri výbere motora najprv potrebné identifikovať zhodu charakteristík motora a pracovného stroja.

Mechanické vlastnosti pracovných strojov
Mechanickou charakteristikou pracovného stroja je závislosť momentu statického odporu stroja od rýchlosti otáčania hnacieho hriadeľa. Pre uľahčenie konštrukcie kĺbu sa táto závislosť zvyčajne vyjadruje rovnakým spôsobom ako motorická charakteristika v tvare ω=φ(Ms -Ms) alebo n =e(Miss).
Moment statického odporu Ms alebo skrátene statický moment je moment odporu, ktorý vytvára stroj na hnacom hriadeli v statickom (stacionárnom) režime, keď sa otáčky nemenia.
Mechanické charakteristiky stroja je možné získať empiricky alebo výpočtom, ak je známe rozloženie statických síl alebo momentov na prvkoch kinematickej schémy.Statické momenty strojov môžu závisieť nielen od rýchlosti, ale aj od iných veličín, preto je pri praktických výpočtoch elektrických pohonov potrebné zvážiť každý prípad samostatne.
Statické momenty rôznych pracovných strojov sú rozdelené do skupín podľa charakteru ich rýchlostnej závislosti (mechanických charakteristík). Najbežnejšie v praxi sú nasledujúce.
1. Statický moment závisí len málo alebo prakticky nezávisí od rýchlosti (krivka 1, obr. 2, b). Takéto vlastnosti majú zdvíhacie mechanizmy, žeriavy, navijaky, kladkostroje, ako aj pásové dopravníky pri konštantnom zaťažení.
2. Statický moment stroja sa zvyšuje úmerne so štvorcom rýchlosti (krivka 2). Táto charakteristika, charakteristická pre axiálne ventilátory, sa nazýva charakteristika ventilátora a analyticky prezentovaná vo forme vzorca: Mc = Mo + kn2, kde Mo je počiatočný statický moment, najčastejšie v dôsledku trecích síl, ktoré zvyčajne nie sú závisí od rýchlosti, k je experimentálny koeficient. Charakteristiky ventilátora majú okrem ventilátorov aj odstredivé a vírivé čerpadlá, separátory, odstredivky, vrtule, turbodúchadlá a rotačné bubny.
3. Statický moment klesá so zvyšujúcou sa rýchlosťou (krivka 3). Táto skupina zahŕňa charakteristiky niektorých dopravníkových mechanizmov a niektorých strojov na rezanie kovov.
4. Statický moment sa mení s rýchlosťou nejednoznačne, s ostrým prechodom kvôli zvláštnostiam technologického procesu. Charakteristiky tejto skupiny majú stroje, ktoré pracujú s častými veľkými preťaženiami, ktoré niekedy vedú k úplnému zastaveniu.Napríklad naberací mechanizmus pre jednokorčekové rýpadlo, škrabkový dopravník, pracujúci pri blokovaní prepravovanej hmoty, drviče a iné stroje.
Okrem uvedených v praxi existujú aj iné typy mechanických charakteristík strojov, napríklad piestové čerpadlá a kompresory, ktorých statické momenty závisia od dráhy.