Výber asynchrónneho elektromotora pre prevádzku v režime dynamického brzdenia vlastným budením
 Asynchrónny elektromotor s vinutým rotorom s najjednoduchšou schémou riadenia — zahrnutie odporu do obvodu rotora má extrémne nízke riadiace vlastnosti. Preto pred dostupnosťou frekvenčných meničov na trhu boli vyvinuté rôzne schémy na dosiahnutie zníženej rýchlosti v režime znižovania.
Asynchrónny elektromotor s vinutým rotorom s najjednoduchšou schémou riadenia — zahrnutie odporu do obvodu rotora má extrémne nízke riadiace vlastnosti. Preto pred dostupnosťou frekvenčných meničov na trhu boli vyvinuté rôzne schémy na dosiahnutie zníženej rýchlosti v režime znižovania.
V skutočnosti ich nie je až tak veľa. V zahraničí sa rozšírilo používanie prídavného elektrického stroja – vírovej brzdy namontovanej na rovnakom hriadeli ako hlavný motor. Schéma vám umožňuje získať dostatočne tuhé mechanické vlastnosti pri znižovaní zaťaženia, ale takýto elektrický pohon má extrémne nízke energetické charakteristiky (brzdná energia sa uvoľňuje vo vírivej brzde). Okrem toho má vírivá brzda pomerne vysoké náklady a značne komplikuje usporiadanie mechanickej časti.
Preto s cieľom dosiahnuť rýchlosť pristátia v zdvíhacích mechanizmoch založených na asynchrónnom motore s fázovým rotorom v závode Dynamo koncom 70. rokov minulého storočia konštrukčný tím pod vedením E.M. Pevzner predstavil samobudené dynamické brzdenie.
Takýto elektrický pohon je široko používaný v domácich žeriavoch (panely typu TSD, TSDI, KSDB pre mostové, portálové a portálové žeriavy, ovládacie panely pre vežové žeriavy KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Hovoríme teda o desiatkach tisíc žeriavov v prevádzke.
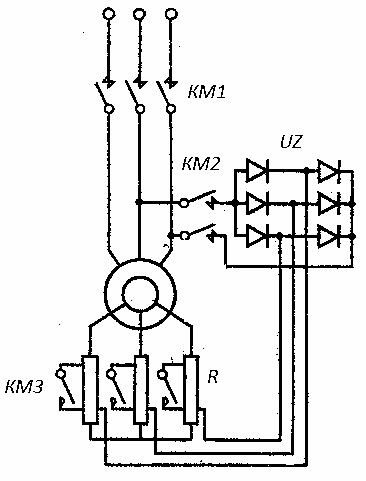
Ryža. 1. Schéma zaradenia asynchrónneho motora do režimu dynamického brzdenia vlastným budením
Princíp dynamického brzdenia s vlastným budením je nasledujúci:
Obvod rotora zahŕňa trojfázový usmerňovač UZ (obr. 1). Elektromotor sa odpája od siete cez stýkač KM1. Usmernené napätie je pripojené k vinutiu statora cez stýkač KM2. Kontakty stýkača KM3 sú zatvorené. Po uvoľnení brzdy (nie je znázornené na obrázku) sa hriadeľ motora začne otáčať pôsobením padajúcej hmotnosti.
Vo vinutí rotora sa indukuje EMF, pod vplyvom ktorého začne prúdiť prúd v obvode rotor-stator. Motor vyvíja brzdný moment, záťaž sa znižuje pri konštantnej rýchlosti. Hodnota rýchlosti je určená hodnotou odporu obvodu rotora. Čím väčší odpor, tým rýchlejšia rýchlosť klesania. Pre zvýšenie rýchlosti je stýkač KM3 vypnutý.
V režime dynamického brzdenia s vlastným budením spotrebúva elektrický pohon energiu zo siete iba na napájanie hydraulického tlačného zariadenia bŕzd a relé-stykača. Ako príklad možno uviesť Obr. 7 sú znázornené mechanické charakteristiky elektrického pohonu s panelom TSD.
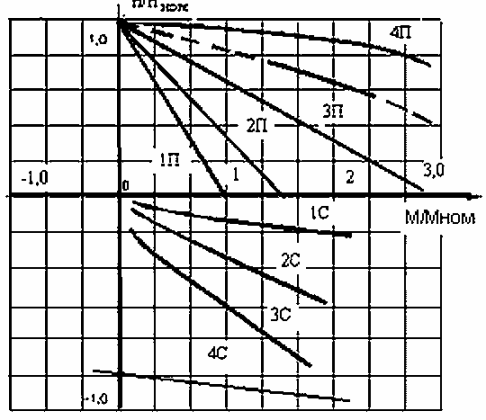
Ryža. 2. Mechanická charakteristika elektrického pohonu zdvíhacieho mechanizmu s panelom TSD
Dynamické brzdné charakteristiky sú označené ako 1C, 2C, 3C. Je vidieť, že charakteristiky majú dostatočnú tvrdosť. Nastavenie rýchlosti sa vykonáva v rozsahu 1: 8, čo je vo väčšine prípadov dostatočné pre hromadné batérie.
Podmienkou samobudenia elektromotora je:
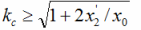
kde x '2- indukčný odpor vinutia rotora, Ohm; хо- indukčný odpor magnetizačného obvodu. Om
Kde ks — koeficient schémy
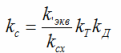
kd — koeficient redukcie prúdu rotora na prúd statora; kcx — koeficient korekčného obvodu, pre trojfázový mostíkový obvod kx = 0,85; kt je transformačný koeficient motora zo statora na rotor
Koeficient kd závisí od schémy zapojenia statorových vinutí, ktoré sú v domácich kohútikových motoroch zapojené do hviezdy pri sieťovom napätí 380 V.
Koeficient kt závisí od transformačného koeficientu, t.j. pomeru napätia statora k napätiu rotora, ktorý závisí od typu motora. Napríklad pre niekoľko elektromotorov radu MT a 4MT je tabuľková hodnota a súvisiace parametre. 1.
Stôl 1.
Typ elektromotora výkon, kWt Napätie rotora, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 73131 55 290 1,51 1,51 1,51 1,51 -6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0, 9 0,7 0,083 2,98 1
Podmienka кс ≥ √(1 + 2х '2/хо) sa vykonáva pre motory typu MTN412-6, 4MTN225L6, ktoré možno nazvať „vzrušené“. Takéto elektromotory vstupujú do režimu samobudenia bez ďalších rozhodnutí o obvode. Avšak v kompletných nízkonapäťových zariadeniach (nízkonapäťových rozvádzačoch alebo ovládacích paneloch) navrhnutých na spoluprácu s takýmito motormi je pre spoľahlivú prevádzku zabezpečené malé počiatočné budenie.
Počiatočné budenie sa uskutočňuje prechodom konštanty, tzv Malá hodnota "napájacieho prúdu" (zvyčajne nie viac ako 10% menovitého prúdu motora) z polvlnového usmerňovača. Pre vybudené motory to v každom prípade stačí na spoľahlivý prechod do režimu dynamického brzdenia s vlastným budením.
Elektromotory MTN512-6, 4MTN280M6, pre ktoré nie je splnená podmienka кс ≥ √(1 + 2х '2/хо), sú „nebudené“. To neznamená, že takéto motory nemôžu pracovať v režime dynamického brzdenia s vlastným budením, ale hodnota dodatočného prúdu, ktorý je pre ne potrebný, dosahuje 50% menovitého prúdu statora.To si vyžaduje použitie špeciálnych NKU (ovládacích panelov) pre nebudené elektromotory. …
Elektromotor typu 4MTN280L10 s кс = √(1 + 2х '2/хо) je na hranici samobudenia a akákoľvek náhodná zmena parametrov môže narušiť podmienku samobudenia. Preto môže byť takýto motor tiež klasifikovaný ako nebuditeľný.
Hlavným parametrom ovplyvňujúcim schopnosť samobudenia elektromotora je menovité napätie rotora E2nom. Kritická hodnota E2nom, pri ktorej nedochádza k samobudeniu bez veľkého napájacieho prúdu, by sa mala brať ako 300 V.
Túto charakteristiku režimu dynamického brzdenia s vlastným budením zohľadnil závod Dynamo a Sibelektromotor PO pri vývoji série 4MT žeriavových elektromotorov na začiatku 80. rokov.
Najmä hodnota E2nom pre niektoré elektromotory bola znížená v porovnaní s predchádzajúcou sériou MT, aby boli motory excitovateľné.
Napríklad pre elektromotor 4MTN225L6, ktorý sa široko používa pri elektrickom pohone vežových žeriavov, sa E2nom znížil v porovnaní s predchádzajúcim motorom série MTN512-6 z 340 na 290 V, vďaka čomu bol motor samobudený. Neskôr spoločnosť OJSC "Sibelectromotor" začala s výrobou elektromotora 4MTM225L6 s rovnakými parametrami.
Postupom času začali elektromotory s podobným určením vyrábať aj iní výrobcovia.
Závod Rzhevsky Crane Construction Plant vyrába elektromotor MKAF225L6, Siberian Electrotechnical Company vyrába elektromotor 4MTM225L6 PND.Napriek vzhľadu odlišnému od prototypu súvisiacemu s technologickými možnosťami každého z výrobcov majú všetky tieto elektromotory rovnaké elektrické parametre a inštalačné rozmery a sú úplne zameniteľné.
Rozdiel v názvoch motorov umožňuje užívateľovi urobiť informovaný výber jedného alebo druhého výrobcu podľa vlastných preferencií, ceny, dodacej lehoty atď. A zároveň si buďte úplne istí, že výmena elektromotora jedného výrobcu vodovodných batérií za elektromotor iného výrobcu nepovedie k poruche vodovodného kohútika alebo k nehode.
V poslednom desaťročí sa však na domácom trhu objavili elektromotory od rôznych výrobcov, ktorých značka presne reprodukuje značku „originálneho“ elektromotora z produkcie JSC „Sibelectromotor“. Dá sa predpokladať, že vznik elektromotorov je spojený s veľkým východným susedom našej krajiny. Ich cena je o niečo nižšia ako u tradičných výrobcov, takže záujem o ne zo strany podnikov je pochopiteľný.
Objednaním elektromotora na inštaláciu na vyrobený žeriav alebo výmenou poškodeného elektromotora na žeriave za funkčný tak môžete získať elektromotor neznámeho výrobcu, s E2nom odlišným od prototypu elektromotora.
Situácia trochu pripomína začiatok 90. rokov, keď po krajine koncertovalo niekoľko popových skupín s rovnakým názvom súčasne.
Pripomeňme si ešte raz, že pomer E2nom / I2nom je najdôležitejším parametrom motora s vinutým rotorom, ovplyvňujúcim výber štartovacích odporov, relé-stykačového vybavenia a ako už bolo spomenuté vyššie, aj podmienku samobudenia motora. elektrický motor.
Na typových štítkoch klonovaných motorov však často nie sú vôbec žiadne údaje o rotoroch. Tu je príklad:
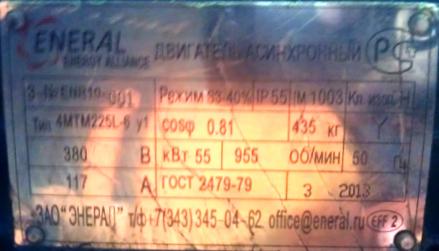
Ryža. 3. Typový štítok asynchrónneho motora rotorového žeriavu
Mimochodom, tento elektromotor mal «správnu» hodnotu E2nom, len teraz to bolo potrebné určiť empiricky.
V katalógoch iných výrobcov pre elektromotor 4MTM225L6 je uvedená hodnota E2nom = 340 V, t.j. vzrušený motor sa stal nevzrušeným motorom. Dôsledkom použitia takéhoto elektromotora ako súčasti elektrického pohonu s dynamickým brzdením s vlastným budením je pokles zaťaženia a oddelenie elektromotora s mechanickou deštrukciou vinutia rotora a statora.
Presne tento obrázok autor nedávno pozoroval v jednom z najstarších ruských strojárskych podnikov, kde bol dodaný nový mostový žeriav s klonovaným elektromotorom typu 4MTM225L6 s E2n = 340 V. Len šťastím, že ľudia nie trpieť. Majiteľ žeriavu navyše po uhýbaní trikrát (!) obnovuje motor.
Ďalší výrobca klonovaných elektromotorov, ktorý zrejme opakovane zažíva podobné nehody, teraz vyrába dva elektromotory pod rovnakou značkou (!). Jeden s E2nom = 340 V, druhý s E2nom = 264 V je uvedený v katalógu s poznámkou: "pre batérie typu KB", t.j. vežové žeriavy.
Takýto motor sa skutočne najčastejšie používa na vežových žeriavoch, ale je inštalovaný aj na mostových žeriavoch. Môžete tak počuť dialóg medzi dodávateľom a zákazníkom: „Na aký žeriav potrebujete motor? Na podlahu. Potom vezmite tento (E2nom = 340 V). » A v pohone elektrických kladkostrojov je ovládací panel so samobudeným dynamickým brzdením. Výsledok je popísaný vyššie.
Zároveň nikto nehovorí, že tieto elektromotory sú chybné alebo nespoľahlivé a nedajú sa použiť na žeriavoch. Čím viac možností na trhu, tým lepšie. Ako sa hovorí, dobrých a odlišných motorov je viac. Ide len o to, že ich značka zavádza spotrebiteľa, čo môže mať nebezpečné následky.
Ak chcete použiť elektromotor s parametrami rotora inými ako prototyp, musíte:
-
Zmerajte E2nom, keď je obvod rotora otvorený a vinutie statora je pripojené k sieti;
-
Na základe meraní E2nom vypočítajte, vyberte a objednajte predradné odpory;
-
Vyberte si ovládací panel pre nebudiace elektromotory z katalógu a objednajte si ho.
Alebo sa môžete jednoducho opýtať na hodnotu E2nom pred objednaním motora, ktorý láka svojou cenou a konkrétne si to dohodnúť v zmluve. To však nevylučuje meranie E2nom pri vstupnom riadení objednaného motora.
Zhrnutím vyššie uvedeného môžeme vyvodiť tieto závery:
-
V elektrickom pohone domácich kohútikov na báze elektromotorov s fázovým rotorom sa široko používa samobudené dynamické brzdenie. V prevádzke sú desaťtisíce takýchto elektrických pohonov. Stále sa vydávajú.
-
Aby mohol elektromotor fungovať v režime dynamického brzdenia s vlastným budením, musí mať určitý pomer E2nom / I2nom.
-
Hlavnou podmienkou pre samobudenie elektromotora s vinutým rotorom je hodnota E2nom ≤ 300 V.
-
Použitie elektromotorov s E2nom> 300 V s ovládacími panelmi určenými pre excitované elektromotory môže spôsobiť pokles záťaže a zničenie elektromotora.