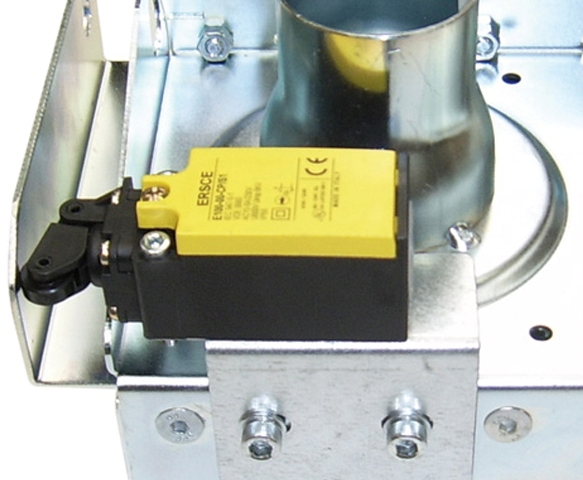
Porovnanie dotykových a bezdotykových pojazdových spínačov
V priemyselnej automatizácii sú obvody široko používané pojazdové (polohové) spínače a výhybky viacnásobné návrhy určené na riadenie polohy rôznych výrobných mechanizmov a založené na transformácii pohybu týchto mechanizmov v elektrickom signále.
Polohové spínače je možné použiť aj na vykonávanie iných funkcií ako je riadenie polohy výrobných mechanizmov, napríklad ovládanie uhla natočenia, hladiny, prítlaku závažia atď.

Smerové spínače sú zariadenia s diskrétnym pôsobením, pracujúce na princípe zvýšenia, to znamená, že reagujú iba na zmenu polohy ovládaného mechanizmu. Výstupný signál smerových spínačov je nejednoznačnou funkciou pohybu mechanizmu z danej počiatočnej polohy.
Typy cestných výhybiek
V závislosti od princípov polohového spínania sa spôsob spínania delí na:
-
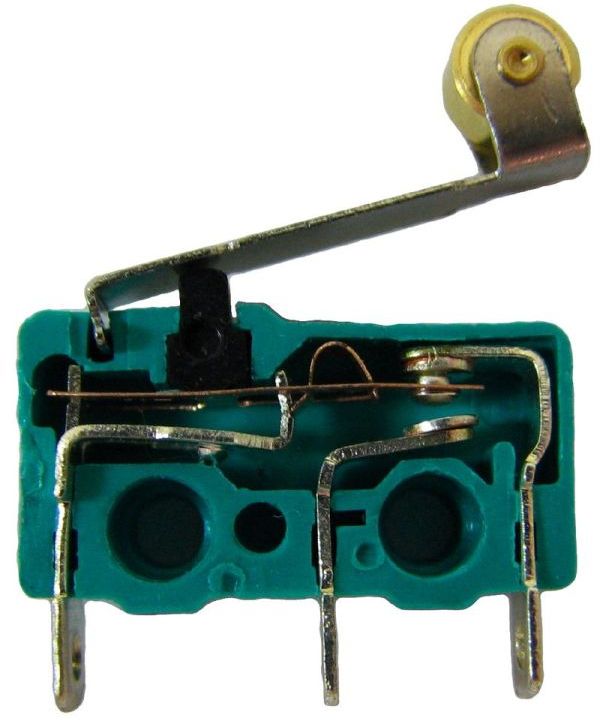
mechanický kontakt vyrobený so spínacími kontaktmi a prvkami citlivými na kontakt;
-
statický kontakt (magnetomechanický), ktorého citlivý prvok je bezkontaktný a spínací prvok je kontakt;
-
statické bezkontaktné, citlivé a spínacie prvky, z ktorých sú vyrobené bezkontaktné.
V kontaktnom charaktere uzla „spínanie - stop“, teda v kontaktnom charaktere spojenia hnacieho prvku (vstupného riadiaceho signálu) s citlivým prvkom, sa tento uzol nazýva mechanický a v bezkontaktnom - statickom .
V závislosti od dizajnu môžu byť spínače kombinované alebo oddelené. V prvom prípade sú citlivé a spínacie prvky umiestnené v jednom puzdre a sú konštrukčne vyhotovené ako celok. V druhom môže byť citlivý prvok umiestnený vo vzdialenosti niekoľkých desiatok a stoviek metrov od spínača.
Skreslenie magnetického poľa dráhového spínača sa dosiahne zmenou parametrov magnetický obvod citlivý prvok. Variabilnými parametrami môže byť aktívna plocha a veľkosť vzduchovej medzery magnetická permeabilita magnetický obvod.
V súčasnosti sa oblasť použitia mechanických kontaktných polohových spínačov v priemyselnej automatizácii zužuje a vzniká otázka nepotrebnosti polohových spínačov tohto typu pre účely budovania automatických riadiacich systémov.
To posledné je spôsobené nasledujúcimi dôvodmi:
-
Zložitosť konštrukcie zostavy vypínača a dorazu v dôsledku prísnosti požiadaviek týkajúcich sa limitov prípustného kolísania množstva parametrov, čo spôsobuje značné ťažkosti pri jeho výrobe a nastavovaní.
-
Relatívne vysoká kritickosť charakteristík presnosti tohto zariadenia na vplyv destabilizujúcich faktorov (opotrebenie kontaktných plôch, uvoľnenie upevňovacích prvkov, nesúososť pohyblivých prvkov atď.).
Množstvo konštrukčných riešení mechanizmov na základe mechanických kontaktných spínačov nie je možné realizovať vôbec. Patria sem mechanizmy, ktoré vyžadujú vysoké prípustné úrovne rýchlosti a frekvencie pohybových spínačov.
Ak je možné požadovanú rýchlosť prevádzky cestnej výhybky znížiť v dôsledku dodatočných kinematických väzieb mechanizmu, ktoré okrem iného zhoršujú kvalitatívne charakteristiky riadiaceho systému (najmä parametre presnosti), potom prípustná prevádzková frekvencia ( rozlíšenie) nemusí byť zvýšené štrukturálnymi komplikáciami.
Pozri tiež: Montáž koncových spínačov a spínačov
Aký je v tomto prípade dôvod pre rozšírené používanie princípu mechanického kontaktu prepínania polohy? Odpoveď na túto otázku treba hľadať v dvoch aspektoch: v existujúcich princípoch konštrukcie automatických riadiacich systémov a vo výhodách spínacieho obvodu kontaktnej dráhy.
Výhody prepínačov kontaktných dráh
Mechanické kontaktné spínače, zvyčajne realizované s viacobvodovým výstupom, sa vyznačujú nasledujúcimi výhodami:
-
vysoký spínací pomer;
-
vysoký špecifický riadiaci výkon (pomer zahrnutého výkonu k celkovým rozmerom);
-
univerzálnosť, to znamená schopnosť spínať obvody jednosmerného aj striedavého prúdu;
-
veľký rozsah zahrnutých napätí;
-
zanedbateľná vnútorná spotreba energie (malá hodnota prechodového odporu kontaktov v zatvorenom stave);
-
nízka závislosť presnosti a stability prevádzky od zmien regulovaného výkonu.
Nevýhody prepínačov kontaktných dráh
Princíp mechanického kontaktu týchto zariadení často neumožňuje splniť zvýšené požiadavky na spoľahlivosť, životnosť a presnosť automatizačných systémov. Okrem toho sú mechanické kontaktné spínače veľmi citlivé na vplyv rôznych klimatických faktorov (najmä pri nízkych teplotách).
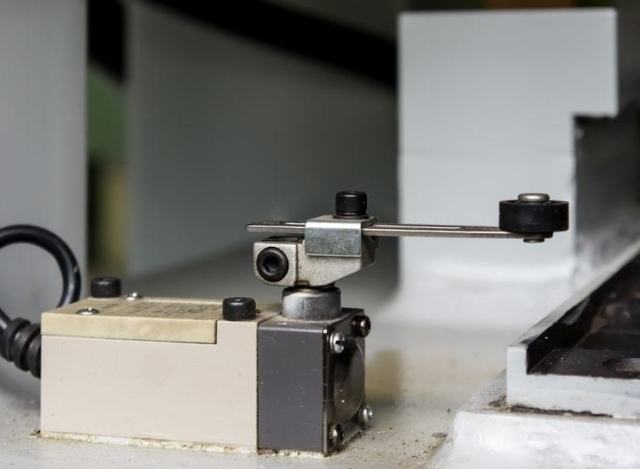
Mechanické kontaktné spínače sa vyznačujú obmedzenými prípustnými úrovňami maximálnej a minimálnej rýchlosti pohybu spínacieho dorazu, ktoré sa pohybujú v rozmedzí 0,3 — 30 m/min a zvýšenie rýchlosti spínacieho dorazu nad prípustnú úroveň vedie k prudkému poklesu v mechanickej odolnosti na vypínači.
V takýchto spínačoch sú prípustné odchýlky smeru pôsobenia spínacej sily voči osi páky veľmi malé a ich prekročenie vedie k mechanickému poškodeniu najmä u spínačov s predným tiahlom.
Aby sa získali charakteristiky reléového výstupu (regulačné charakteristiky), v konštrukcii takýchto spínačov sú poskytnuté zariadenia so spúšťacou pružinou. Požadovaný stupeň výstupných charakteristík relé je dosiahnutý za cenu výrazného zníženia životnosti spínača v dôsledku veľkých dynamických napätí vyskytujúcich sa v spúšti v čase aktivácie.
V mechanických momentových kontaktných spínačoch dosahuje šírka hysteréznej slučky (diferenciál zdvihu) výstupnej charakteristiky významnú hodnotu, ktorá je pre množstvo technologických procesov úplne neprijateľná z dôvodu neproduktívneho predlžovania doby spracovania.
Zníženie rozdielu v dráhe týchto prehadzovačov súvisí buď so zvýšením zložitosti ich konštrukcie alebo so zvýšením ich veľkosti. Okrem toho sú v niektorých prípadoch potrebné značné mechanické sily na ovládanie mechanických kontaktných spínačov.
Výhody a nevýhody bezdotykových spínačov
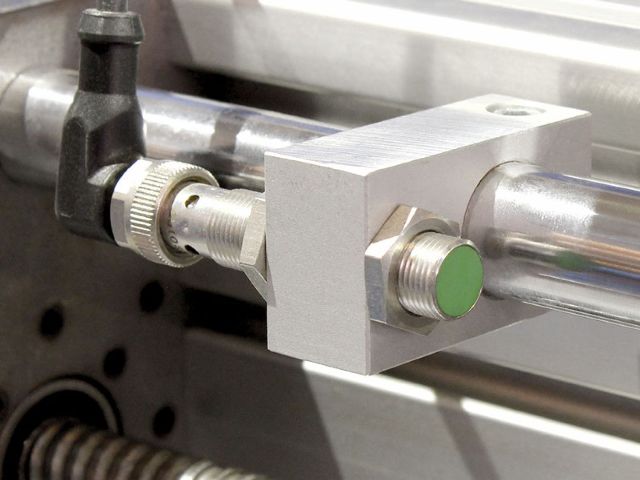
Vyššie uvedené okolnosti vedú k potrebe vyvinúť zariadenia, ktoré nemajú uvedené nevýhody a zároveň sú schopné vykonávať podobné funkcie. Takéto zariadenia sú bezdotykové spínače, ktorého výhody zahŕňajú:
-
výrazná trvanlivosť s vysokou spoľahlivosťou a vysokou prípustnou prevádzkovou frekvenciou;
-
nie je potrebná mechanická námaha pri ovládaní, nízka citlivosť na vibrácie, zrýchlenie atď.;
-
nevýznamná citlivosť parametrov na zmeny v pomerne širokom rozsahu vonkajších podmienok;
-
zlepšenie podmienok prevádzkových služieb.
Vďaka nízkej úrovni spätnej väzby bezdotykového spínača je dosiahnuté výrazné zjednodušenie konštrukcie stop spínača pri zachovaní vysokej stability charakteristík presnosti v čase. Okrem toho absencia elektrických a mechanických kontaktov zaisťuje požiarnu a výbuchovú bezpečnosť týchto zariadení, čo výrazne rozširuje oblasť ich možnej aplikácie.
Jednou z významných nevýhod bezkontaktných koncových spínačov je náročnosť implementácie mnohých konštrukčných úprav, ktoré sa dajú jednoducho implementovať do mechanických kontaktných koncových spínačov.
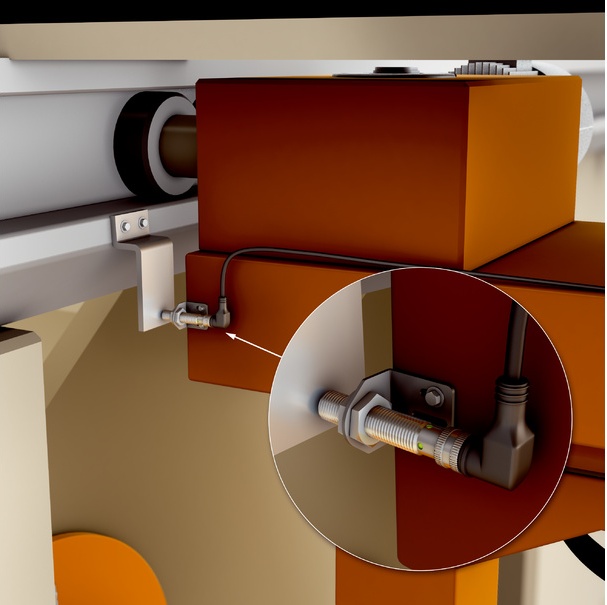
Zariadenie bezdotykového spínača
Princíp činnosti statických bezkontaktných dráhových spínačov parametrického typu je založený na využití skreslenia magnetického alebo elektrického poľa vytváraného citlivým prvkom, keď sa v jeho oblasti objaví hnací prvok, v dôsledku čoho vzniká nevyvážený stav. sa vyskytuje v elektrickom obvode spínača a spúšťa sa výstupné zariadenie.
Statické bezdotykové spínače sa najčastejšie vyrábajú s jedným výstupným obvodom a v niektorých spínačoch je aktivácia sprevádzaná objavením sa signálu na výstupe (efekt priameho spínania), v iných - zmiznutím (efekt spätného spínania), čo je ekvivalentné na uzatváracie a otváracie kontakty mechanických kontaktných dráh.
Ak je v obvode reléového bezdotykového spínača zosilňovací prvok, výstupný parameter snímacieho prvku môže byť v spojitej funkčnej závislosti od riadeného pohybu.
V súčasnosti sa používajú početné konštrukčné úpravy bezdotykových pojazdových spínačov, ktoré sa líšia úrovňou citlivosti (veľkosť pracovnej medzery), umiestnením štrbiny alebo rovinou citlivého prvku vzhľadom na montážnu rovinu, smerom vodiace vodiče, počet krokov snímacieho prvku (pri vyhotovení so štrbinami), hĺbku štrbiny, dĺžku pripojovacích vodičov, úroveň napájacieho napätia, charakter ochrany pred vplyvmi prostredia atď.
Možnosti použitia bezkontaktných pohybových spínačov sú určené parametrami ich elektrických a mechanických charakteristík.
Elektrické parametre zahŕňajú:
- charakter výstupného signálu a počet výstupných obvodov;
- spotreba a výstupný výkon;
- tvar výstupného signálu; spínací koeficient pre odpor a napätie (pre spínače typu transformátora);
- charakteristiky časovania (časy spúšťania a uvoľnenia) a frekvencia streľby (rozlíšenie);
- úrovne a tvar napájacieho napätia, ako aj prípustné hranice ich odchýlok.
Parametre mechanického výkonu zahŕňajú:
- citlivosť (veľkosť pracovnej medzery),
- rozmery a rozmery pripojenia;
- charakteristiky presnosti (hlavné a dodatočné chyby) a rozdiel zdvihu;
- charakteristiky inštalácie (typy spínacích bŕzd a spôsob ich inštalácie, úroveň spätnej väzby, spôsob montáže a inštalácie spínača);
- úroveň ochrany pred hlukom.
Viac informácií o zariadení a prepínačoch s bezdotykovým spínačom nájdete tu: Bezdotykové snímače polohy mechanizmov
Ivenski Yu. N.Bezkontaktné pojazdové spínače v priemyselnej automatizácii