Uzavreté automatické riadiace systémy
 Uzavreté automatické riadiace systémy (ACS) sa líšia od otvorených okruhov v použitom zariadení a v úplnosti automatizácie. Pri otvorenom ACS nedostáva hlavná jednotka (vrátane ovládacieho zariadenia) informácie o aktuálnom prevádzkovom režime elektroinštalácie (hnací motor, bežiaci stroj).
Uzavreté automatické riadiace systémy (ACS) sa líšia od otvorených okruhov v použitom zariadení a v úplnosti automatizácie. Pri otvorenom ACS nedostáva hlavná jednotka (vrátane ovládacieho zariadenia) informácie o aktuálnom prevádzkovom režime elektroinštalácie (hnací motor, bežiaci stroj).
V uzavretom ASUB sa informácie prenášajú do riadiacich prvkov, čo je sprevádzané odoslaním príslušných príkazových signálov. Obvod, ktorý prenáša takéto informácie, uzatvára riadiacu slučku a vytvára uzavretý ACS alebo spätnoväzbový ACS.
Rozdiel medzi uzavretým a otvoreným ACS možno vysvetliť na príklade riadenia rýchlosti elektromotora v systéme generátor-motor (G-D). Pri otvorenom ACS (obr. 1, a) sa nastavené otáčky elektromotora nastavujú manuálne potenciometrom P. Nastavenie otáčok sa vykonáva vizuálne tachometrom, ktorý je napájaný tachogenerátorom TG. Akákoľvek odchýlka otáčok od požadovanej hodnoty je operátorom eliminovaná pôsobením na posúvač potenciometra.
V uzavretom ACS (obr.1, b) kotva tachogenerátora TG je zaradená do budiaceho obvodu generátora OVG, čím vzniká uzavretý alebo spätnoväzbový systém (v tomto prípade so spätnou väzbou otáčok).
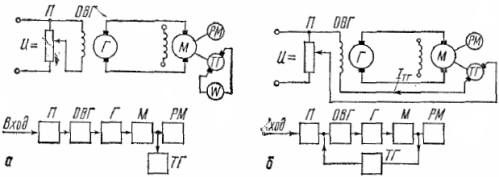
Ryža. 1. Riadiaci obvod elektromotora v systéme G -M: a — otvorený ACS, b — uzavretý ACS
Prúd generovaný tachogenerátorom (Aztg) v uzavretom obvode smerovaný na prúd potenciometra (Azn) a výsledný prúd pôsobí v obvode rovný geometrickému rozdielu týchto prúdov. Posuvníkom potenciometra obsluha nastaví hodnotu výsledného prúdu v budiacej cievke OVG, pri ktorej sú zabezpečené zodpovedajúce otáčky elektromotora. Tu sa úloha operátora končí. V budúcnosti systém automaticky udržiava nastavený režim prevádzky elektrického pohonu s určitou presnosťou.
Predpokladajme, že v dôsledku špičky zaťaženia sa rýchlosť elektromotora znížila v porovnaní s uvedenou rýchlosťou. Zníženie otáčok je sprevádzané zodpovedajúcim znížením otáčok tachogenerátora a napätia na jeho svorkách. To zase povedie k zníženiu prúdu Aztg v obvode spätnej väzby a v určitej polohe posúvača potenciometra - k zvýšeniu výsledného prúdu v budiacom vinutí generátora. Napätie generátora a otáčky motora sa zodpovedajúcim spôsobom zvýšia.
Proces zvyšovania rýchlosti a napätia bude pokračovať, kým prúd v spätnoväzbovej slučke nedosiahne nastavenú hodnotu a otáčky motora nedosiahnu nastavenú hodnotu.
Pri analýze automatických riadiacich systémov funkčné grafy… Na obr.2 prenosová funkčná schéma ACS, ktorá obsahuje nasledujúce prvky:
1 — hlavné zariadenie, ktoré nastavuje režim činnosti, dáva príkaz, spúšťací impulz alebo signál,
2 — prvok porovnania. Zahŕňa signál X1 z mastera, signál X0, ktorý určuje rýchlosť alebo úroveň regulovanej hodnoty. S prihliadnutím na signál z deviateho hlavného spätnoväzbového prvku prvok 2 porovnáva prijaté signály a vysiela dodatočne opravený signál X2,
3 — transformačný prvok, signál op ho transformuje do inej formy, vhodnejšej na ďalší prenos. Napríklad signál X2 je dodávaný vo forme hydraulického (pneumatického, mechanického) tlaku, prvok 3 ho premieňa na elektrický prúd. Pretože tento druh transformácie môže vyžadovať dodatočnú energiu, potom je prvok 3 pripojený k zdroju energie PE,
4 – pridávanie prvku, prijíma dva signály: X3 a X8 z korekčného prvku (pamäťového prvku) 8. Tieto signály sú sčítané prvkom 4 a odosielané do ďalšieho prvku,
5 — zosilňovací prvok, vstupný signál X1 môže byť slabý a pre následný prenos ho treba zosilniť. Toto sa vykonáva prostredníctvom prvku 5, ktorý je pripojený k zdroju PE napájania,
6 — výkonný prvok, vykonáva prijímaný signál (elektromotor, elektromagnetické relé, servomotor),
7 — nastaviteľný predmet alebo pracovný stroj.
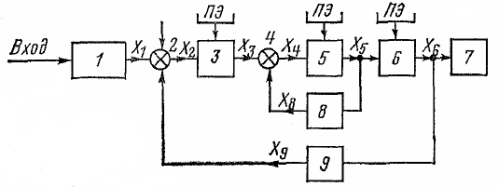
Ryža. 2. Funkčná schéma ACS
Každý automatizačný prvok je menič energie, na vstupe ktorého je pridaná hodnota X' a hodnota X je odstránená z výstupu. «Pre každý prvok v stacionárnom stave existuje určitá závislosť X» (X'), ktorá sa nazýva statická charakteristika.
Uzavretý automatický riadiaci systém sa vyznačuje prítomnosťou spätnej väzby; má aspoň jednu spätnoväzbovú slučku spájajúcu výstup systému s jeho vstupom. Okrem toho môže existovať takzvaná vnútorná spätná väzba, spájajúca výstup a vstup jednotlivých prvkov ACS.
Spätná väzba sa delí na tvrdú a pružnú. Pevné obmedzenia fungujú v prechodných aj stacionárnych režimoch prevádzky systému, flexibilné - iba v prechodných. Rozlišujte medzi pozitívnou a negatívnou spätnou väzbou. Keď sa regulovaná hodnota zvyšuje, kladné spojenie ju ešte zvyšuje a záporné naopak klesá. Spätná väzba môže prenášať signály úmerné uhla natočenia, rýchlosti, napätia, prúdu atď. a podľa toho sa nazývajú spätné väzby uhla, rýchlosti, napätia a prúdu. Viac podrobností nájdete tu: Prvky automatizačných systémov
Podľa princípu činnosti možno ACS rozdeliť do troch skupín:
-
nepretržitá prevádzka, pri ktorej nie je narušený vzťah medzi kontrolovanými a nastavenými hodnotami,
-
impulzná akcia, pri ktorej v pravidelných intervaloch prebieha spojenie medzi riadenými a nastavenými hodnotami,
-
reléová akcia, pri ktorej ku komunikácii dochádza len vtedy, keď hodnota dosiahne určitú hodnotu.
V závislosti od zákona, podľa ktorého sa daná hodnota mení v priebehu času, možno ACS rozdeliť do troch skupín:
-
systémy s konštantnou alebo nízkou žiadanou hodnotou, v ktorých sa automaticky regulovaná hodnota udržiava konštantná. Ide o stabilizačné systémy, ktoré sú v podstate automatickými riadiacimi systémami (ACS),
-
systémy, v ktorých sa cieľová hodnota mení podľa konkrétneho, vopred určeného programu. Ide o systém správy softvéru,
-
systémy, v ktorých sa daná hodnota môže značne meniť a podľa ľubovoľného zákona, t.j. sledovacie systémy.