Schémy ovládania elektrického pohonu z viacerých miest
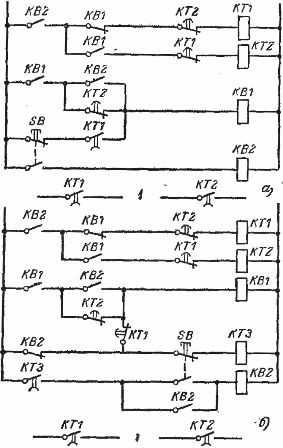
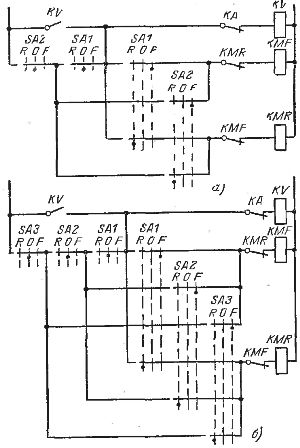
 Pri kontinuálnych procesných linkách, kde pohony pracujú prevažne v jednom smere (vpred) a reverzácie sú zriedkavé, sa odporúča použiť obvod (obr. 1) so zahrnutím linkového stýkača pre prevádzku „vpred“ cez istič, a pre "reverzný" chod — cez ovládacie kontakty stýkača KMR. Toto usporiadanie skracuje čas na spustenie pohonu v preferovanom smere.
Pri kontinuálnych procesných linkách, kde pohony pracujú prevažne v jednom smere (vpred) a reverzácie sú zriedkavé, sa odporúča použiť obvod (obr. 1) so zahrnutím linkového stýkača pre prevádzku „vpred“ cez istič, a pre "reverzný" chod — cez ovládacie kontakty stýkača KMR. Toto usporiadanie skracuje čas na spustenie pohonu v preferovanom smere.
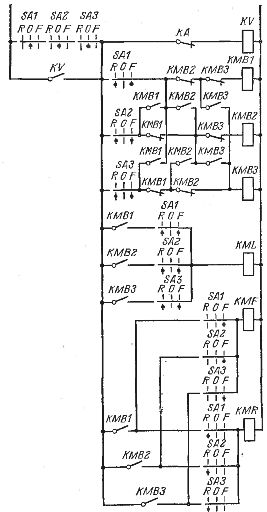
Schéma na obr. 2 umožňuje diaľkové reverzibilné ovládanie elektromotora z pohybujúceho sa objektu. Tento okruh sa používa napríklad na ovládanie motorov krytov vykurovacích studní zo žeriavu. Signálne obvody a príjem rôznych signálov sú znázornené na obr. 3 – 9.
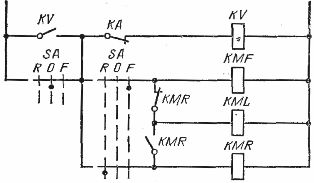
Ryža. 1. Schéma ovládania zadného motora so vzácnou zadnou «zadnou».
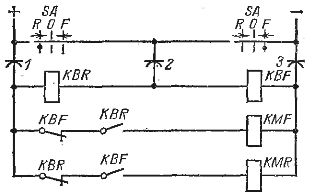
Ryža. 2. Schéma reverzibilného ovládania motora pomocou riadiaceho trolla.
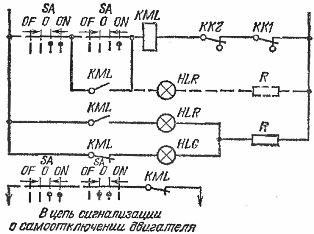
Ryža. 3. Schéma signalizácie stavu nevratného elektrického pohonu.
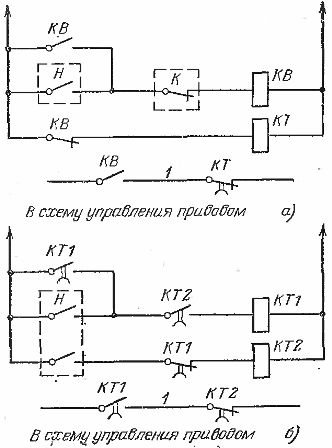
Ryža. 4.Obvody na príjem signálu s časovým oneskorením po začiatku vystavenia dlhému (a) a impulznému (b) signálu: K — odblokovací kontakt, 1 — kontakty na riadiaci obvod pohonu.
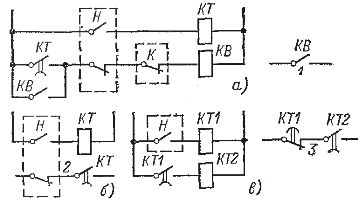
Ryža. 5. Schémy pre príjem signálu po skončení úderu (z chvosta) signálu H dlhý (a), pulz (b), pulz s časovým oneskorením (c). K — odblokovací kontakt, 1, 2, 3 — kontakty riadiaceho obvodu pohonu.
Ryža. 6. Schéma príjmu dlhého signálu po začiatku sekundárneho H.
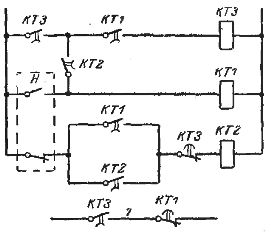
Ryža. 7. Schéma príjmu impulzného signálu s časovým oneskorením po sekundárnom pôsobení signálu H (KT1 je 0,2-0,8 s; KT2 0,3 s; KTZ 0,5 s). 1 — kontakty na riadiaci obvod pohonu.
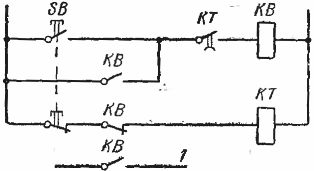
Ryža. 8. Schéma príjmu signálu s určitou dobou trvania, bez ohľadu na trvanie stlačenia tlačidla: 1 — kontakt na riadiaci obvod pohonu.
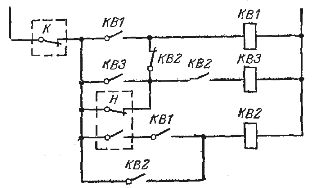
Schémy počítania sa používajú na automatické ovplyvnenie pohonu po spočítaní určitého počtu operácií alebo cyklov. Môžu počítať uzávery a otvory (obr. 10), len uzávery (obr. 11), alebo len otvory (obr. 12).
Počítanie impulzov podľa uvedených schém sa dodáva z kontaktov fotografického relé, pohybových spínačov alebo iných zariadení.
V schéme počítania znázornenej na obr. 10 je použité relé REV850 s magnetickým "prilepením" kotvy, a preto prerušenie napájania tohto obvodu neruší počítanie. V iných počítacích obvodoch, keď je prerušené napájanie, dochádza k strate počtu impulzov.
Ak chcete skontrolovať platnosť schémy účtu (obr. 11), ovládacie tlačidlá… Zakaždým, keď stlačíte tlačidlo SB0N, obvod vykoná jedno počítanie. Tlačidlo SB0F sa používa na vynulovanie počítadla.Takéto tlačidlá môžu byť poskytnuté aj v iných schémach.
Ryža. 9. Obvody na príjem signálov v dvoch rôznych obvodoch postupným stlačením jedného tlačidla: a — trvanie signálu sa rovná trvaniu stlačenia tlačidla, b — trvanie signálu nezávisí od trvania stlačenia tlačidla. , 1 — kontakty na riadiaci obvod pohonu.
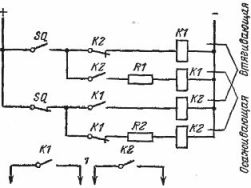
Ryža. 10. Schéma účtu do dvoch.
Impulzy pre každé číslo sú jedno zopnutie a jedno otvorenie kontaktu koncového spínača SQ; 1 — kontakty na riadiaci obvod pohonu.
Počítanie impulzov v obvodoch na obr. 11, 12 sú krátkodobé zopnutia (rozopnutie) kontaktu SQ a zopnutý stav tohto kontaktu by mal postačovať na zopnutie impulzného stýkača KNA a jedného relé KB (KL).
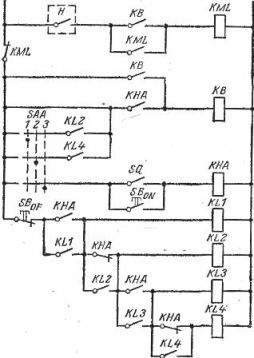
Ryža. 11. Schéma na počítanie do troch pri zopnutom kontakte SQ.
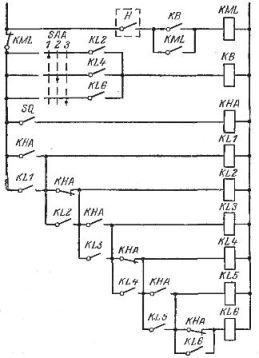
Ryža. 12. Schéma počítania do troch pri otvorení kontaktu SQ
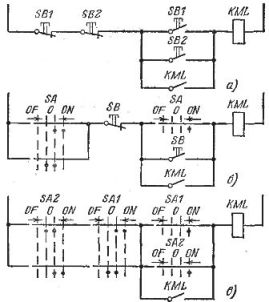
Ryža 13. Schémy nevratného ovládania motora z dvoch miest: a — dvoma tlačidlami, b — tlačidlom a kľúčom, c — dvoma kľúčmi.
Ryža. 14. Schéma jednostranného závislého reverzného riadenia elektrického pohonu z dvoch miest.
Počítanie vynuluje sieťový stýkač KML; čas zopnutia stýkača SQ musí byť kratší ako čas zapnutia stýkača KML.
Schémy počítania pre o niečo väčšie číslo je možné zostaviť analogicky s vyššie uvedenými schémami, ale keď je počet väčší ako päť alebo osem, alebo v prípadoch, keď je strata počítania po zmiznutí napätia neprijateľná, odporúča sa použiť očíslované relé.
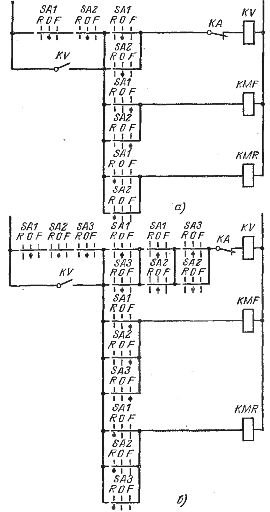
Ryža. 15. Schémy závislého reverzibilného riadenia motora: a — z dvoch miest, b — z troch miest
Je možné použiť relé počtu krokov motora typu E-526 pre až 30 impulzov alebo relé počtu impulzov typu E 531 s počtom impulzov až 75. Relé pracujú na striedavý prúd a ich kontakty umožňujú vypnutie pri 220 V resp. a DC 50 a 30 wattov.
Riadiace obvody elektromotorov z viacerých miest môžu byť závislé, jednosmerne závislé a nezávislé (obr. 13). Najčastejšie sa ako najjednoduchšie používajú závislé riadiace schémy (obr. 15). Podľa týchto schém pri ovládaní akéhokoľvek ovládacieho zariadenia pohyb rukoväte iného zariadenia z nuly do prevádzkovej polohy spôsobí zastavenie motora.
Podľa schém jednosmerne závislého ovládania z dvoch (obr. 14) a troch (obr. 16) miest je možné spínač SA1 ovládať nezávisle od polohy spínača SA2 (SA2 a SA3). Ovládanie prepínača SA2 je možné, keď je prepínač SA1 v nulovej polohe a nezávisí od polohy prepínača SA3. Ovládanie spínačov SA3 je možné, keď sú spínače SA1 a SA2 v nulovej polohe.
Obrázok 16. Schéma jednosmerného závislého riadenia trojmiestneho piestového motora
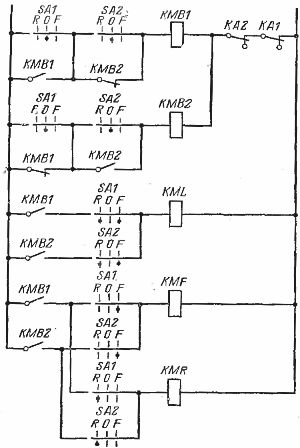
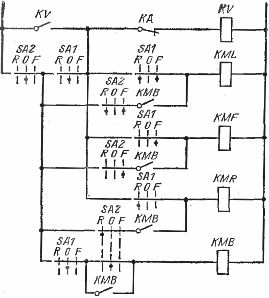
Ryža. 17. Schéma nezávislého reverzibilného riadenia motora z dvoch miest.
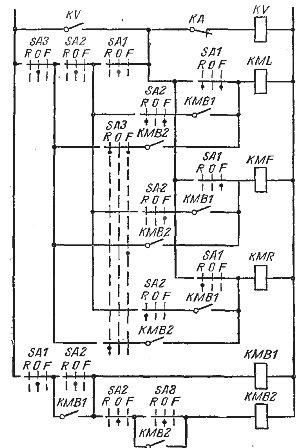
Ryža. 18. Schéma nezávislého reverzibilného riadenia motora z troch miest.
V nezávislých riadiacich schémach (obr. 17 a 18), keď je pohon ovládaný ktorýmkoľvek prvým spínačom (SA1, SA2 alebo SA3), pohyb rukoväte druhého spínača neovplyvňuje činnosť pohonu. Po návrate do nulovej polohy kľučky prvého kľúča sa pohon zastaví bez ohľadu na polohu kľučky druhého kľúča (alebo dvoch ďalších). Nový štart je možný až po vrátení druhého kľúča (alebo dvoch ďalších) do nulovej polohy.
Veľmi často využívajú riadenie pohonu z dvoch a troch miest podľa zjednodušenej schémy (obr. 19); to znamená prednostné ovládanie len z jedného prvého miesta (kľúč SA1). Keď je pohon ovládaný iným spínačom (SA2 alebo SA3), posunutím rukoväte prvého spínača z nulovej polohy sa ovládanie prenesie na tento spínač.
Ryža. 19. Zjednodušené schémy ovládania reverzibilného elektrického pohonu: a — z dvoch miest, b — z troch miest.