Riadenie motora ako funkcia prúdu
 Riadenie motora je možné vykonať v závislosti od sily prúdu statora. Štartovací obvod ako funkcia prúdu indukčného motora s vinutým rotorom je znázornený na obr. 1a.
Riadenie motora je možné vykonať v závislosti od sily prúdu statora. Štartovací obvod ako funkcia prúdu indukčného motora s vinutým rotorom je znázornený na obr. 1a.
V momente štartu prúd dosiahne hodnotu I1 a po určitom časovom intervale klesne na hodnotu I2 (obr. b). V tomto bode sa automaticky skratuje časť rozbehového odporu v obvode rotora, prúd stúpne na hodnotu I1, potom opäť klesne na hodnotu I2, čo spôsobí skrat ďalšej časti rozbehového odporu. Tento proces sa opakuje, kým nie sú všetky stupne štartovacieho odporu skratované. Na tieto účely sa používa nadprúdové relé, ktorého vinutia sú súčasťou výkonového obvodu motora.
Keď kliknete na tlačidlo štart SB1 (pozri obr. A) je aktivovaný stýkač KM, ktorého hlavné kontakty spájajú motor so sieťou na spoločnom rozbehovom odpore v obvode rotora. V tomto prípade cievka relé KA prijíma energiu, ktorej otváracie kontakty sú v obvode cievky akcelerátora K1.Relé KA je nastavené tak, že doba odozvy je kratšia ako u stýkača K1. Okrem toho jeho vypínacie kontakty na maximálnej prípustnej hodnote štartovací prúd otvorené a keď prúd klesne na svoju spínaciu hodnotu, opäť sa zatvoria, čím sa cievka K1 zapne cez kontakty relé KA v okamihu skratu stupňa štartovacieho odporu.
Relé KA bude fungovať pred aktiváciou stýkača zrýchlenia K1 a motor sa zrýchli po úplnom zavedení štartovacieho odporu. Keď sa spúšťací spínací prúd zníži, kontakty relé KA sa uzavrú a cievka K1 sa zapne. Súčasne sa zatvorí kontakt K1, čím sa zabezpečí samonapájanie cievky nezávisle od relé KA, a kontakt v riadiacom obvode sa otvorí, čím sa zabráni predčasnému zapojeniu urýchľovača K2.
Keďže napájacie kontakty K1 sú súčasťou skratu štartovacieho odporu, statorový prúd sa zvýši na maximálnu hodnotu a relé KA pri spustení otvorí svoje kontakty v napájacom obvode cievky K2. Keď motor dosiahne dostatočnú rýchlosť a statorový prúd klesne späť na spínací prúd, kontakty relé KA sa uzavrú a zopnú cievku K2, čím sa skratuje druhý stupeň štartovacieho odporu na jej kontaktoch.
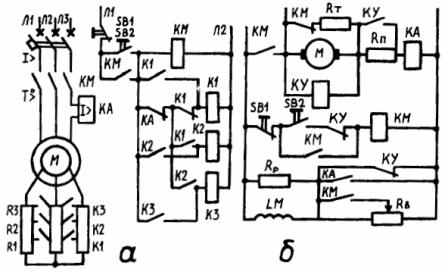
Ryža. 1. Riadiace obvody v závislosti od prúdu: a — asynchrónny motor s fázovým rotorom; b — Jednosmerný motor s paralelným budením
V tomto prípade sa statorový prúd opäť zvýši, relé KA bude fungovať a otvorí svoje kontakty. Cievka K2 nestratí energiu, pretože bude mať čas uzavrieť pomocou pomocných kontaktov K2.Ďalší pokles prúdu statora po ďalšom zrýchlení spôsobí zopnutie vinutia K3 a skratovanie posledného stupňa štartovacieho odporu. Stlačením tlačidla SB sa motor zastaví a okruh je pripravený na ďalšie spustenie. Pomocou prúdových relé nakonfigurovaných na návrat pri prúde 12 je možné zastaviť a obrátiť rôzne elektrické pohony. Nevýhodou riadiacich obvodov v súčasnej funkcii je pomerne veľký počet kontaktov.
Na nevratné riadenie paralelne budeného jednosmerného motora s výkonom niekoľkých kilowattov možno použiť jeden stupeň štartovacieho reostatu (pozri obr. C). Schéma ukazuje: regulačný odpor RB v budiacom obvode; vybíjací odpor Rp zapojený paralelne s budiacou cievkou LM; brzdný odpor RT zapojený paralelne s kotvou M pri odpojení od siete a rozbehový odpor RP zapojený sériovo do obvodu kotvy počas doby rozbehu. Aby sa dosiahol maximálny tok pri štarte, LM budiaca cievka v počiatočnej polohe je zapnutá pri plnom napätí.
Po stlačení tlačidla SB2 je kotva motora zo sieťového stýkača KM zapojená sériovo do siete s odporom RP Riadiace relé štartéra SC pracuje v závislosti od prúdu kotvy. Keď sa prúd zvyšuje, uzatvárací kontakt KA manipuluje s odporom RB, čím sa zvyšuje budiaci magnetický tok, a keď sa prúd znižuje, kontakt KA sa otvára a LM cievka je zapojená do série s odporom reostatu RB v dôsledku ktorým magnetický prúd klesá.
Keď je motor naštartovaný, zvýšený štartovací prúd kotvy zapne KA relé a LM cievka vytvorí maximálny tok. Po dosiahnutí určitej rýchlosti sa zapne stýkač zrýchlenia K, rozbehový odpor RP je skratovaný, po čom motor pracuje podľa svojich prirodzených charakteristík. Pri poklese prúdu kotvy (v dôsledku zrýchlenia motora) pred zopnutím relé KA sa rozpojí kontakt KA v budiacom obvode.
LM vinutie sa zapne v sérii s odporom RB, čo spôsobí oslabenie toku poľa a zodpovedajúcim spôsobom zvýšenie prúdu kotvy. Relé KA bude opäť fungovať, čím sa zvýši tok a súčasne sa zvýši rýchlosť motora. Počas štartovania sa relé kozmickej lode niekoľkokrát spustí, kým motor nedosiahne rýchlosť nastavenú riadiacim reostatom RB. Takéto vibračné zariadenie fungujúce ako prúdová funkcia zjednodušuje obvod v porovnaní s riadiacimi obvodmi ako funkcia času.
Po zapnutí motora stlačením tlačidla SB1 sa zopne kotva od rozpínacieho kontaktu KM po brzdný odpor RT a automaticky sa vykoná dynamické brzdenie. Na začiatku dorazu je magnetické pole mierne oslabené otvorením KM kontaktu na posúvači regulačného reostatu a budiaci prúd prechádza celým odporom RB. Keď otáčky motora ďalej klesajú, zrýchľovací stykač K je bez napätia a tok sa zvyšuje, keď je budiaca cievka zapnutá na plné sieťové napätie cez rozpínací kontakt K, čo vedie k zvýšeniu brzdného momentu.