Obvody riadenia stykača a ochrany motora
 V závislosti od funkcie, ktorá sa má vykonať, existujú rôzne riadiace obvody motora stýkača.
V závislosti od funkcie, ktorá sa má vykonať, existujú rôzne riadiace obvody motora stýkača.
Obrázok 1a zobrazuje kombinovanú schému nevratného magnetického štartéra... V ňom sa usporiadanie prvkov zhoduje s usporiadaním v prírode, to znamená, že všetky prvky umiestnené v štartovacej skrinke sú zoskupené na ľavej strane schémy a tlačidlová stanica s tlačidlami «Štart» a «Stop» zobrazené na pravej strane diagramu.
Tlačidlová stanica je zvyčajne umiestnená v určitej vzdialenosti od magnetický štartér… Na pochopenie princípu činnosti riadiaceho obvodu motora sa zvyčajne používajú podrobné (základné) schémy (obr. 1.b). Stlačením štartovacieho tlačidla SB2 sa uzavrie obvod cievky stýkača KM, ktorý obsahuje tri kontakty KM napájacieho obvodu motora. V tomto prípade sa zopne aj blokový kontakt KM zapojený paralelne so štartovacím tlačidlom SB2. To vám umožní napájať cievku KM, keď sa uvoľní tlačidlo SB2.
Motor sa zastaví stlačením tlačidla SB1, zatiaľ čo sa cievka vypne a uvoľní napájacie (hlavné) kontakty a pomocný kontakt. Keď uvoľníte tlačidlo SB1, obvod cievky KM bude bez napätia. Ak chcete reštartovať motor, znova stlačte tlačidlo SB2.
Tento obvod tiež poskytuje takzvanú nulovú ochranu, to znamená, že ak sieťové napätie zmizne alebo klesne na 50-60% nominálnej hodnoty, cievka KM neudrží napájacie kontakty KM a motor sa vypne. Keď sa napätie objaví alebo zvýši na hodnotu blízku menovitej hodnote, magnetický štartér sa samovoľne nezapne. Ak ho chcete zapnúť, musíte znova stlačiť tlačidlo štart.
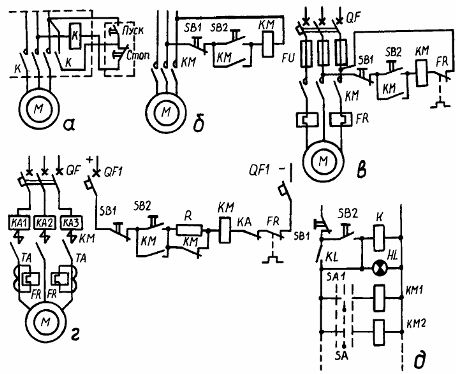
Ryža. 1. Schémy riadenia a ochrany motora: a — kombinované a b — podrobná schéma nereverzibilného magnetického štartéra; c — ochrana motora pomocou poistiek a tepelných relé; d — schéma riadiacej stanice výkonného motora; d — nulová ochrana pred medziľahlým relé
Ochrana motora pred prehriatím vinutia sa vykonáva pri dlhodobom preťažení tepelné relé FR, a ochranu pred veľkým preťažením alebo skratom zabezpečujú poistky FU resp istič QF (obr. 1, c). Na ochranu pred dlhodobým preťažením sa používajú dve tepelné relé, pretože s jedným relé v prípade spálenej poistky v sérii, ku ktorej je pripojený vykurovací článok tohto relé, bude motor pripojený k jednofázovej sieti a nebudú chránené. Vypínacie kontakty týchto relé sú zapojené do série so štartovacou cievkou. Keď sa jeden z nich otvorí, cievka KM je bez napätia a motor sa zastaví, ako keď sa stlačí tlačidlo SB1.
Riadiaca stanica vysokovýkonného motora je znázornená na obr. 1, d. Ochranu proti skratu zabezpečuje relé proti preťaženiu KA1 — KA3, ochranu proti preťaženiu zabezpečujú tepelné relé FR pripojené cez prúdové transformátory. Cievka trojpólového stýkača je napájaná jednosmerným prúdom. Na zníženie prúdu v cievke stýkača po jej zaradení do obvodu sa zavádza dodatočný odpor R, ktorý bol predtým skratovaný otvoreným kontaktom KM.
V ručných riadiacich obvodoch s viacerými ovládačmi, spínačmi alebo inými zariadeniami sa na zabezpečenie neutrálnej ochrany používajú medziľahlé relé. (obr. 1, e) Na privedenie napätia do riadiaceho obvodu stlačte tlačidlo SB2, čím sa zapne medzirelé K, ktorého súčasťou je jeho uzatvárací kontakt K a signálka HL, indikujúca prítomnosť napätia v riadiacom obvode. . Po uvoľnení tlačidla SB2 dôjde k zablokovaniu cievky relé, zatiaľ čo obvody ovládača SM1, prepínača paketov SM atď. a cievky stýkačov KM1, KM2 atď. budú pod napätím.
V uvažovaných schémach sú samosvorné kontakty potrebné na nepretržitú prevádzku motorov. V praxi často motor potrebuje bežať len vtedy, keď je stlačené tlačidlo štartovania, napríklad pri zdvíhacích strojoch. V tomto prípade nie je v riadiacom obvode tlačidlo Stop (obr. 2, a). Niekedy je potrebné zabezpečiť chod pohonu v dvoch režimoch, to znamená zapnúť ho na krátky čas pri nastavovaní stroja alebo na dlhší čas. Potom krátkym stlačením tlačidla SB2 (obr. 2.b) zopne cievka stýkača KM a zopne samosvorný kontakt KM, pričom po uvoľnení tlačidla SB2 motor beží. .
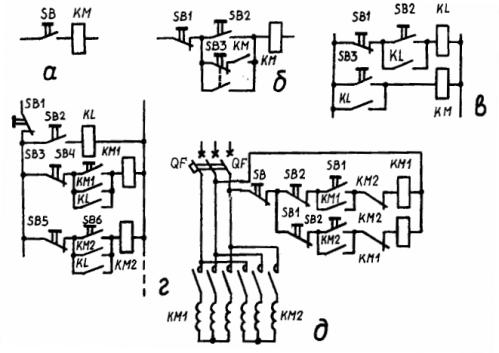
Ryža. 2. Typy riadiacich obvodov pre asynchrónne motory: a — v režime krokovania; b a c — pri dlhšej práci a joggingu; d — súčasné zaradenie niekoľkých motorov; d — plynulý štart dvojrýchlostného motora
Pre režim ovládania motora stlačte tlačidlo SB3, jeho zapínací kontakt zapne cievku stýkača KM a rozpínací kontakt preruší samosvorný obvod stýkača. Nevýhodou tohto obvodu je, že otvorený kontakt tlačidla SB3 sa môže zatvoriť skôr, ako sa otvorí kontakt bloku KM a motor sa nevypne. Obvod znázornený na obr. 2, f, nemá túto chybu.
Pre nepretržitú prevádzku sa stlačením tlačidla SB2 zapne medziľahlé relé K. Jeden z kontaktov K zapne cievku stýkača KM a druhý súčasne zablokuje tlačidlo SB2, čím sa vypne chod motora pomocou štartovacieho tlačidla. prepustený. Ak chcete spustiť prevádzku, stlačte tlačidlo SB3 a podržte ho požadovaný čas.
Obrázok 2d znázorňuje schému spustenia viacerých motorov súčasne z jedného štartovacieho tlačidla pomocou medziľahlého relé ... Tlačidlo SB2 zapína relé K, ktorého uzatváracie kontakty súčasne zapínajú cievky stýkačov KM1, KM2 atď. Zastavte všetky motory súčasne pomocou tlačidla SB1. Na zapnutie a vypnutie každého motora jednotlivo použite tlačidlá SB3, SB4 a SB5, SB6 atď.
Plynulý štartovací diagram dvojrýchlostného dvojvinutia motora s rotorom nakrátko zobrazený na obr. 2, e. Na spustenie motora pri prvej rýchlosti sa používa tlačidlo SB1, pri druhej - SB2.Obe tlačidlá sú mechanicky blokované, aby sa zabránilo tomu, že motor zaradí dve rýchlosti súčasne.
Štartovacie obvody sú tiež elektricky blokované. Takže, keď je napríklad aktivovaná cievka KM1, rozpínací kontakt preruší obvod cievky KM2, čím je vylúčená možnosť jej zapojenia. Ak chcete prepnúť na druhú rýchlosť, musíte stlačiť tlačidlo SB2, zatiaľ čo obvod cievky KM1 je prerušený a vypne sa. Cievka obvodu KM2 prijíma energiu a zapína motor na druhú rýchlosť.
Spätné ovládanie asynchrónnych motorov sa vykonáva pomocou dvoch stykačov (obr. 3, a).
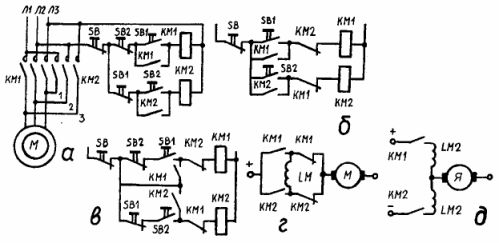
Obr. 3. Schémy ovládania motora: a — reverzibilný magnetický štartér s mechanickým blokovaním; b — to isté s elektrickým blokovaním; c – kombinácia možností a a b; d a e — spúšťanie a reverzácia nízkovýkonných jednosmerných motorov
Stýkač KM1 sa používa na zapojenie motora vpred a KM2 sa používa na spätný chod. Aby sa zabránilo náhodnému súčasnému zapnutiu dvoch stýkačov, čo vedie ku skratu, obvod využíva (pozri obr. 3, a) vzájomné mechanické blokovanie s dvoma prerušovacími kontaktmi tlačidiel SB1 a SB2. Stlačením tlačidla SB1 zapnite obvod cievky KM1 a odpojte obvod cievky KM2.
Pri súčasnom stlačení tlačidiel SB1 a SB2 sa prerušia obvody cievok KM1 a KM2 a žiadny zo stýkačov sa nezapne. Blokovanie sa vykonáva pomocou dvoch prerušovacích kontaktov KM2 a KM1, ktoré sú súčasťou obvodov cievok KM1 a KM2 (obr. 3, b). Ak chcete obrátiť motor v tejto schéme, musíte najskôr stlačiť tlačidlo SB.
Obvod na obr. 3, c je kombináciou dvoch predchádzajúcich obvodov, to znamená, že existuje dvojité blokovanie.Tlačidlo SBI zapína stýkač KM1 a obvod cievky stýkača KM2 je prerušený súčasne otvoreným kontaktom tlačidla SB1 a kontaktom bloku KM1.
Obrázok 3, da e ukazuje najjednoduchšie schémy spúšťania a reverzácie sekvenčne budených motorov s nízkym výkonom ... Takéto motory sú pripojené k sieti bez spúšťacích reostatov. Podľa diagramu na obr. 3, d, spustenie a reverzácia motora so sériovým budením sa vykonáva pomocou dvoch medziľahlých relé. Motor sa obráti obrátením smeru prúdu v budiacej cievke LM. V motoroch s dvoma sériovými budiacimi vinutiami, ktoré vytvárajú magnetické toky v opačných smeroch, má spínací a reverzný obvod iba dva kontaktné kontakty (pozri obr. 3, e).
Ako je zrejmé z uvažovaných riadiacich schém, je najjednoduchšie automatizovať proces spúšťania a spätného chodu asynchrónnych motorov s rotorom vo veveričke. V tomto prípade je všetka kontrola pri štartovaní obmedzená na pripojenie motora k elektrickej sieti a pri zastavení - na odpojenie od siete.
Zložitejšia je automatizácia spúšťania, zastavovania a zastavovania indukčných motorov s fázovým vinutím rotora, indukčných motorov s kotvou nakrátko so zvýšeným výkonom, jednosmerných motorov stredného a vysokého výkonu, viacrýchlostných indukčných motorov so stupňovitým štartom, ako aj ako synchrónne motory. Tieto motory sú riadené ako funkcia času, rýchlosť a prúd.
Okrem vyššie uvedených prípadov je možné vykonať kontrolu motora a podľa princípu cesty, kedy sa motor naštartuje a spomalí, keď pracovné teleso dosiahne určitú polohu v priestore.Systémy vykonávajúce takéto funkcie sa nazývajú systémy s otvorenou slučkou, pretože nemajú žiadnu spätnú väzbu medzi výstupnou hodnotou a vstupnou hodnotou.