Riadiace obvody motora ako funkcia rýchlosti
 Pri riadení motora sa rýchlosť monitoruje ako funkcia otáčok rotora motora, aby sa pri zmene ovplyvňovali príslušné ovládacie prvky.
Pri riadení motora sa rýchlosť monitoruje ako funkcia otáčok rotora motora, aby sa pri zmene ovplyvňovali príslušné ovládacie prvky.
V riadiacich obvodoch spúšťania motora je možné použiť relé regulácie otáčok alebo malé meracie elektrické generátory. Na tieto účely sa však používajú extrémne zriedkavo kvôli zložitosti dizajnu, vysokým nákladom a nedostatočnej spoľahlivosti. Preto sú otáčky motora riadené nepriamymi metódami. V asynchrónnych a synchrónnych motoroch je frekvencia otáčania riadená emf a frekvenciou rotorového prúdu a v jednosmerných motoroch emf kotvy.
Na obr. 1, a a b znázorňujú schémy automatického spustenia paralelne budeného jednosmerného motora v závislosti od frekvencie otáčania a v závislosti od EMF a napätia kotvy od okamihu spustenia. Riadenie frekvencie otáčania sa vykonáva meraním EMF motora, ktoré sa mení úmerne k frekvencii otáčania.
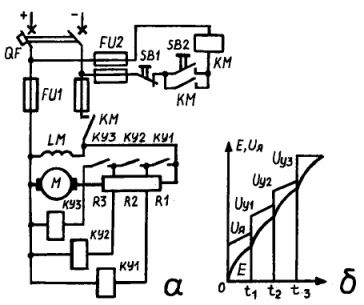
Ryža. 1.Riadiace obvody ako funkcia rýchlosti: aab — schéma zapojenia a štartovania paralelne budeného jednosmerného motora
Keďže EMF je úmerné otáčkam motora, automatické zadávanie jednotlivých stupňov štartovacieho reostatu sa uskutočňuje pri určitej veľkosti ovládacieho napätia zrýchľovacích stykačov KM1, KM2 a KMZ, z ktorých každý je nastavený na určité zatiahnutie. hodnotu. Stlačením štartéra tlačidlá SB2 zapína sieťový stýkač KM. Všetky odpory R1, R2, R3 budú zapojené do série s vinutím kotvy a budú obmedzovať prúd.
Pri určitej rýchlosti n1 je napätie Uy1 cievky stykača K1

kde Tu Toto je koeficient stroja.
Keď sa Uy1 bude rovnať sťahovaciemu napätiu, stýkač KM1 bude fungovať a skratuje odpor R1. Ďalšie zvýšenie rýchlosti otáčania až do otočenia n2 a n3 povedie k zvýšeniu napätia na cievkach stýkačov K2 a skratu na hodnoty


V tomto prípade stýkače K2 a skrat budú pracovať v sérii a skratujú odpory R2 a R3. Po skratovaní odporu R3 sa ukončí štartovací proces a motor môže bežať dlhú dobu.
EMF v obvode rotora indukčného motora je úmerné sklzu, t.j. E2s = E2s. Tu E2 je emf stacionárneho rotora.
Čím je sklz nižší, tým je EMF nižšia, to znamená, že rýchlosť rotora motora je vyššia. Na riadenie štartovania striedavých motorov s navinutým rotorom sa používajú relé, ktoré riadia hodnotu EMF v obvode rotora.Na tieto napätia sú prispôsobené príslušné zariadenia (relé, stýkače), ktoré skratujú rozbehové odpory.
Na riadenie indukčných motorov s vinutým rotorom a synchrónnych motorov možno použiť aj frekvenčnú metódu ako funkciu rýchlosti. Tento spôsob je založený na známej závislosti frekvencie rotorového prúdu f2 na frekvencii otáčania statorového poľa n0 a rotora n2, t.j.
Pretože každá rýchlosť rotora zodpovedá určitej hodnote f2, relé nastavené na túto frekvenciu a pripojené k obvodu rotora motora bude pôsobiť na obvod cievky stýkača. Stykač skratuje odporové stupne pri danej rýchlosti.
Brzdenie protiľahlými motormi sa vykonáva v závislosti od rýchlosti relé regulácie rýchlosti SR. Na obr. 2 a, b znázorňujú príklady zastavenia asynchrónnych motorov opozíciou.
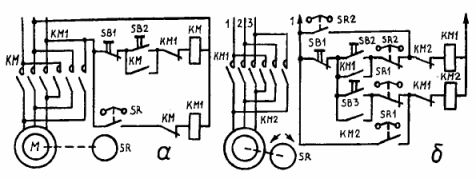
Ryža. 2. Schémy zastavenia asynchrónnych motorov pomocou opozície: a — nereverzibilné; b - reverzibilné
Poďme sa pozrieť na to, ako tieto schémy fungujú.
Stlačením tlačidla SB2 sa zapne cievka stýkača KM (pozri obr. 2, a), čím sa zatvoria napájacie kontakty a zablokuje sa tlačidlo SB2. Zároveň ich kontakt vypínacieho bloku KM v obvode cievky stýkača brzdy KM1 a relé riadenia otáčok SR odpojí od siete. Keď rotor motora dosiahne určitú rýchlosť, kontakt SR sa zopne, ale to už nespôsobí činnosť stýkača KM1. Motor ďalej beží normálne.
Zastavenie motora protispínacou brzdou sa vykoná stlačením tlačidla SB.Súčasne je cievka stykača KM neutralizovaná a jej hlavné kontakty zmiznú a odpojí motor od siete. Rozpínací kontakt KM v obvode stýkača brzdy KM1 sa zopne. Keďže v tomto momente je kontakt relé riadenia rýchlosti SR zopnutý, hlavné kontakty stýkača brzdy sú okamžite zapnuté a vinutie statora je prepnuté na spätný chod, magnetické pole sa začne otáčať v opačnom smere, t.j. rotácia rotora a motora sa zastaví protispínaním. Otáčky rotora sa znížia a pri určitej malej hodnote sa rozopnú jeho kontakty relé riadenia otáčok RKS a odpojí motor od siete.
Pri spätnom riadení s opačným brzdením (obr. 2, b) sa motor spustí vpred stlačením tlačidla SB1, ktoré uzavretím obvodu cievky stýkača KM1 zabezpečí pripojenie motora na siete. Rotor motora sa začne otáčať a keď dosiahne určitú rýchlosť, uzatvárací kontakt SR1 relé regulácie rýchlosti sa zopne a otvárací kontakt SR2 sa otvorí.
Zapnutie cievky stýkača KM2 sa nestane, pretože rozpínací kontakt stýkača KM1 prerušil jeho obvod. V tejto polohe bude motor ďalej bežať, kým nestlačíte tlačidlo SB. Po stlačení tlačidla SB sa obvod cievky KM1 vypne. Tým sa zatvorí vypínací kontakt KM1 a obvod cievky stýkača KM2 bude napájaný.
Vinutie statora motora sa zapne, aby sa obrátil. Keď sa rotor zotrvačnosťou stále otáča v rovnakom smere, dochádza k protichodnému brzdeniu.Keď otáčky klesnú na určitú malú hodnotu, relé riadenia rýchlosti otvorí svoj kontakt SR1, stýkač KM2 sa vypne a odpojí motor od siete.
Ak chcete naštartovať motor v spätnom chode, stlačte tlačidlo SB2. Celý proces bude podobný opísanému. Úlohu brzdového stýkača teraz hrá stýkač KM1 a kontakty SR2 relé riadenia rýchlosti budú riadiť proces brzdenia.
Automatické spustenie synchrónneho motora je spojené so známymi ťažkosťami, pretože v tomto prípade je potrebné nielen obmedziť štartovací prúd, ale aj synchronizovať stroj so sieťou.
Riadiaci obvod pre synchrónny motor s nízkym výkonom je znázornený na obr. 3. Obmedzenie nábehového prúdu je zabezpečené aktívnymi odpormi vo vinutí statora. Pred naštartovaním motora zapnite automatické vstupné spínače QF a QF1 AC a DC siete, ktoré poskytujú maximálnu a tepelnú ochranu. Stlačením štartovacieho tlačidla SB2 sa zapne cievka stýkača KM a vinutie statora synchrónneho motora cez hlavné kontakty KM sa pripojí k sieti cez štartovacie odpory Rn. Cievka je samosvorná a jej kontakt v jednosmernom obvode obsahuje blokovacie relé KV, ktorého zapínací kontakt, zopnutím, pripraví cievky stýkačov K1 a K2 na zopnutie.
Frekvenčné relé KF1 a KF2 v budiacom obvode LM rotora pracujú v závislosti od otáčok motora.Pri rozbehu, kedy je sklz rotora najväčší, sa rozopnú vypínacie kontakty relé KF1 a KF2.K otvoreniu cievok dôjde predtým, ako sa zapne blokovacie relé KV a cievka K1 nebude napájaná. Reléové kontakty KF1 a KF2 sa opäť zatvoria, keď otáčky motora dosiahnu približne 60-95% synchrónne v súlade s reguláciou relé.
Po zopnutí kontaktov relé KF1 sa zapne cievka stykača K1, jeho kontakty v hlavnom obvode skratujú štartovacie odpory Rp a stator sa zapne na plné sieťové napätie. Pri zopnutých otvorených kontaktoch relé KF2 sa vytvorí obvod na napájanie cievky stýkača K2, nezávisle od stýkača K1 sa jeho kontakt rozopne rýchlosťou približne 60 % synchrónnej rýchlosti.
Stykač K2 má dve vinutia: jedno hlavné, ťažné KM1 a druhé vinutie KM2, určené na uvoľnenie zámku, ktorý je dodávaný so stýkačom. Po zapnutí navíjacej cievky KM1 sa v budiacom obvode uzavrú uzatváracie kontakty K2 a rozopnú sa rozpínacie kontakty K2, čím sa odpojí vinutie rotora od vybíjacích odporov R1 a R2 a rotor sa pripojí k jednosmernej sieti.
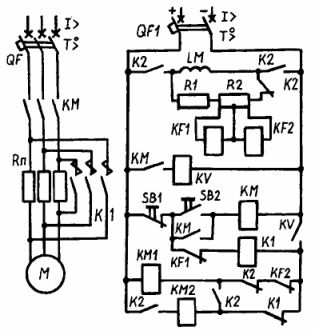
Ryža. 3. Schéma riadenia synchrónneho motora
Kontakty stýkača K2 pracujú v nasledujúcom poradí. N/O kontakt K2 sa otvorí v napájacom obvode snímacej cievky, ale blokovanie udrží stýkač pod napätím. Zatváracie kontakty K2 sa zatvoria v napájacom obvode dvoch cievok a v obvode cievky KM2, čím sa obvod pripraví na následné zapnutie. Cievka K2 bude odpojená, akonáhle sa uvoľní blokovací mechanizmus z cievky KM2. Motor sa odpojí od siete stlačením tlačidla SB1.Cievka K1 uvoľní svoj otvárací kontakt v obvode cievky KM2, čím sa uvoľní západka a vypne sa cievka KM1, po čom sa obvod vráti do pôvodnej polohy.